رابطہ کنندہ کنٹرول اور موٹر پروٹیکشن سرکٹس
 انجام دینے والے فنکشن پر منحصر ہے، مختلف رابطہ کار موٹر کنٹرول سرکٹس ہیں۔
انجام دینے والے فنکشن پر منحصر ہے، مختلف رابطہ کار موٹر کنٹرول سرکٹس ہیں۔
شکل 1a ایک ناقابل واپسی مقناطیسی اسٹارٹر کی ایک مشترکہ اسکیم کو دکھاتا ہے... اس میں عناصر کی ترتیب فطرت میں ترتیب کے ساتھ ملتی ہے، یعنی اسٹارٹر باکس میں موجود تمام عناصر کو خاکہ کے بائیں جانب گروپ کیا گیا ہے، اور "اسٹارٹ" اور "اسٹاپ" بٹنوں کے ساتھ پش بٹن اسٹیشن خاکہ کے دائیں جانب دکھایا گیا ہے۔
بٹن اسٹیشن عام طور پر سے کچھ فاصلے پر واقع ہوتا ہے۔ مقناطیسی سٹارٹر… موٹر کنٹرول سرکٹ کے آپریشن کے اصول کو سمجھنے کے لیے، تفصیلی (بنیادی) خاکے عام طور پر استعمال کیے جاتے ہیں (تصویر 1.b)۔ SB2 سٹارٹ بٹن دبانے سے، KM contactor coil سرکٹ بند ہو جاتا ہے، جس میں موٹر سپلائی سرکٹ کے تین KM رابطے شامل ہوتے ہیں۔ اس صورت میں، سٹارٹ بٹن SB2 کے ساتھ متوازی طور پر منسلک بلاک رابطہ KM بھی بند ہو جاتا ہے۔ یہ آپ کو KM کوائل کو توانائی بخشنے کی اجازت دیتا ہے جب SB2 بٹن جاری ہوتا ہے۔
موٹر کو SB1 بٹن دبانے سے روک دیا جاتا ہے جب کہ کوائل بند ہو جاتی ہے اور پاور (مین) رابطوں اور معاون رابطہ کو جاری کرتی ہے۔ جب SB1 بٹن جاری ہوتا ہے، کوائل KM کا سرکٹ ڈی انرجائز ہو جائے گا۔ انجن کو دوبارہ شروع کرنے کے لیے، SB2 بٹن کو دوبارہ دبائیں۔
یہ سرکٹ نام نہاد صفر تحفظ بھی فراہم کرتا ہے، یعنی اگر مینز کا وولٹیج غائب ہو جاتا ہے یا برائے نام کے 50-60% تک گر جاتا ہے، تو KM کوائل KM پاور کے رابطوں کو نہیں روکے گا اور موٹر بند ہو جائے گی۔ جب کوئی وولٹیج ظاہر ہوتا ہے یا برائے نام قدر کے قریب کسی قدر تک بڑھ جاتا ہے، تو مقناطیسی اسٹارٹر بے ساختہ مشغول نہیں ہوگا۔ اسے آن کرنے کے لیے، آپ کو اسٹارٹ بٹن کو دوبارہ دبانے کی ضرورت ہے۔
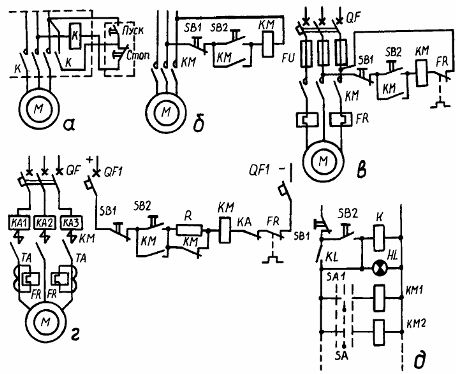
چاول۔ 1. موٹر کنٹرول اور تحفظ کی اسکیمیں: a — مشترکہ اور b — ایک ناقابل واپسی مقناطیسی اسٹارٹر کی تفصیلی اسکیم؛ c - فیوز اور تھرمل ریلے کے ذریعے انجن کی حفاظت؛ d - طاقتور انجن کنٹرول اسٹیشن کا خاکہ؛ d - انٹرمیڈیٹ ریلے سے صفر تحفظ
سمیٹ کے زیادہ گرم ہونے سے موٹر کا تحفظ طویل اوورلوڈ کے دوران کیا جاتا ہے۔ تھرمل ریلے FR، اور بڑے اوورلوڈز یا شارٹ سرکٹس کے خلاف تحفظ فیوز FU یا کے ذریعے فراہم کیا جاتا ہے۔ سرکٹ بریکر کیو ایف (تصویر 1، سی)۔ طویل اوورلوڈز سے بچانے کے لیے، دو تھرمل ریلے استعمال کیے جاتے ہیں، کیونکہ ایک ریلے کے ساتھ، اڑنے والے فیوز کی صورت میں، اس سلسلے میں جس کے ساتھ اس ریلے کا حرارتی عنصر منسلک ہوتا ہے، موٹر کو سنگل فیز نیٹ ورک سے منسلک کیا جائے گا اور ان کی حفاظت نہیں کی جائے گی۔ ان ریلے کے ٹوٹنے والے رابطے اسٹارٹر کوائل کے ساتھ سیریز میں جڑے ہوئے ہیں۔ جب ان میں سے کوئی ایک کھلتا ہے، KM کوائل ڈی انرجائز ہو جاتا ہے اور موٹر رک جاتی ہے، جیسا کہ جب SB1 بٹن دبایا جاتا ہے۔
ایک ہائی پاور موٹر کنٹرول سٹیشن تصویر میں دکھایا گیا ہے۔ 1، ڈی. شارٹ سرکٹ تحفظ اوورلوڈ ریلے KA1 - KA3 کے ذریعے فراہم کیا جاتا ہے، موجودہ ٹرانسفارمرز کے ذریعے منسلک تھرمل ریلے FR کے ذریعے اوورلوڈ تحفظ فراہم کیا جاتا ہے۔ تین قطب کنٹیکٹر کی کنڈلی براہ راست کرنٹ کے ساتھ فراہم کی جاتی ہے۔ سرکٹ میں شامل ہونے کے بعد کانٹیکٹر کوائل میں کرنٹ کو کم کرنے کے لیے، ایک اضافی ریزسٹنس R متعارف کرایا جاتا ہے، جسے پہلے اوپن کانٹیکٹ KM کے ذریعے مختصر کیا جاتا تھا۔
متعدد کنٹرولرز، سوئچز، یا دیگر آلات کے ساتھ دستی کنٹرول سرکٹس میں، غیر جانبدار تحفظ فراہم کرنے کے لیے انٹرمیڈیٹ ریلے استعمال کیے جاتے ہیں۔ (تصویر 1، ای) کنٹرول سرکٹ پر وولٹیج لگانے کے لیے، بٹن SB2 دبائیں، اس طرح انٹرمیڈیٹ ریلے K کو آن کریں، جس میں اس کا بند ہونے والا رابطہ K اور سگنل لیمپ HL شامل ہے، جو کنٹرول سرکٹ میں وولٹیج کی موجودگی کی نشاندہی کرتا ہے۔ . SB2 بٹن کو جاری کرنے کے بعد، ریلے کوائل بلاک ہو جائے گا جبکہ SM1 کنٹرولر، SM پیکٹ سوئچ وغیرہ کے سرکٹس۔ اور کنٹیکٹرز KM1، KM2 وغیرہ کے کنڈلیوں کو متحرک کیا جائے گا۔
زیر غور اسکیموں میں، موٹروں کے مسلسل آپریشن کے لیے خود کو بند کرنے والے رابطے ضروری ہیں۔ اکثر عملی طور پر انجن کو صرف اس وقت چلانے کی ضرورت ہوتی ہے جب اسٹارٹ بٹن دبایا جاتا ہے، مثال کے طور پر لفٹنگ مشینوں میں۔ اس صورت میں، کنٹرول سرکٹ میں کوئی سٹاپ بٹن نہیں ہے (تصویر 2، اے)۔ بعض اوقات یہ ضروری ہوتا ہے کہ ڈرائیو کے آپریشن کو دو طریقوں میں یقینی بنایا جائے، یعنی مشین کو سیٹ اپ کرتے وقت اسے تھوڑی دیر کے لیے آن کرنا یا طویل مدت کے لیے۔ اس کے بعد، بٹن SB2 (تصویر 2.b) کے ایک مختصر دبانے سے، کنٹیکٹر KM کی کوائل آن ہو جائے گی اور KM کا سیلف لاکنگ کنٹیکٹ بند ہو جائے گا، جب کہ SB2 بٹن کے جاری ہونے پر موٹر چلے گی۔ .
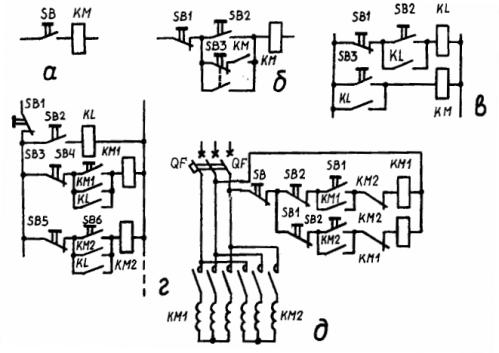
چاول۔ 2. غیر مطابقت پذیر موٹرز کے لیے کنٹرول سرکٹس کی اقسام: a — جاگنگ موڈ میں؛ b اور c - طویل کام اور جاگنگ کے دوران؛ d - کئی انجنوں کی بیک وقت شمولیت؛ d — دو رفتار والی موٹر کا بغیر سٹیپ لیس آغاز
موٹر کنٹرول موڈ کے لیے، SB3 بٹن کو دبائیں، اس کا بند ہونے والا رابطہ کنٹیکٹر KM کی کوائل کو آن کر دیتا ہے، اور کھلنے والا رابطہ کانٹیکٹر کے سیلف لاکنگ سرکٹ کو توڑ دیتا ہے۔ اس سرکٹ کا نقصان یہ ہے کہ SB3 بٹن کا کھلا رابطہ KM بلاک کے کھلنے سے پہلے بند ہو سکتا ہے اور موٹر بند نہیں ہوتی ہے۔ انجیر میں دکھایا گیا سرکٹ۔ 2، ف، اس عیب سے خالی ہے۔
مسلسل آپریشن کے لیے، SB2 بٹن کو دبانے سے انٹرمیڈیٹ ریلے K آن ہو جاتا ہے۔ کانٹیکٹس میں سے ایک K کنٹیکٹر KM کی کوائل کو آن کر دیتا ہے، اور دوسرا بیک وقت SB2 بٹن کو بلاک کر دیتا ہے، اس طرح سٹارٹ بٹن کے ساتھ انجن کا آپریشن بند ہو جاتا ہے۔ جاری آپریشن شروع کرنے کے لیے، SB3 بٹن دبائیں اور اسے مطلوبہ وقت تک پکڑے رکھیں۔
شکل 2d ایک انٹرمیڈیٹ ریلے کا استعمال کرتے ہوئے ایک اسٹارٹ بٹن سے ایک ہی وقت میں کئی موٹریں شروع کرنے کی اسکیم دکھاتا ہے... بٹن SB2 ریلے K کو آن کرتا ہے، جس کے بند ہونے والے رابطے بیک وقت KM1، KM2 وغیرہ کے کنٹیکٹرز کو آن کرتے ہیں۔ SB1 بٹن کے ساتھ تمام موٹرز کو بیک وقت روک دیں۔ ہر موٹر کو انفرادی طور پر آن اور آف کرنے کے لیے بالترتیب بٹن SB3، SB4 اور SB5، SB6 وغیرہ استعمال کریں۔
دو رفتار والی دو سمیٹنے والی گلہری-کیج روٹر موٹر کا ایک سٹیپلیس سٹارٹنگ ڈایاگرام تصویر 4 میں دکھایا گیا ہے۔ 2، e. انجن کو پہلی رفتار سے شروع کرنے کے لیے، بٹن SB1 استعمال کیا جاتا ہے، دوسری پر - SB2۔انجن کو ایک ہی وقت میں دو رفتاروں میں مشغول ہونے سے روکنے کے لیے دونوں بٹن میکانکی طور پر آپس میں جڑے ہوئے ہیں۔
سٹارٹر سرکٹس بھی برقی طور پر مسدود ہیں۔ لہذا، جب، مثال کے طور پر، کوائل KM1 کو فعال کیا جاتا ہے، افتتاحی رابطہ کوائل KM2 کے سرکٹ کو توڑ دیتا ہے، اس کے شامل ہونے کے امکان کو چھوڑ کر۔ دوسری رفتار پر جانے کے لیے، آپ کو بٹن SB2 دبانے کی ضرورت ہے، جب کہ کوائل KM1 کا سرکٹ ٹوٹ جاتا ہے اور یہ بند ہوجاتا ہے۔ KM2 سرکٹ کی کوائل پاور حاصل کرتی ہے اور دوسری رفتار سے موٹر کو آن کرتی ہے۔
غیر مطابقت پذیر موٹروں کا ریورس کنٹرول دو رابطہ کاروں کا استعمال کرتے ہوئے کیا جاتا ہے (تصویر 3، اے)۔
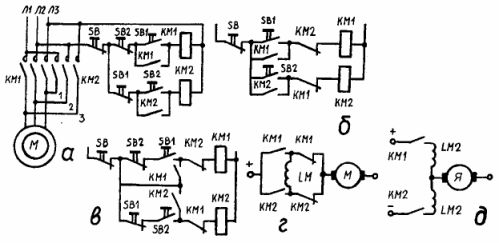
انجیر. 3. انجن کنٹرول اسکیمیں: ایک - مکینیکل بلاکنگ کے ساتھ الٹنے والا مقناطیسی اسٹارٹر؛ b — الیکٹریکل بلاکنگ کے ساتھ بھی۔ c - اختیارات a اور b کا مجموعہ؛ d اور e - کم طاقت والی DC موٹروں کو شروع کرنا اور تبدیل کرنا
کنیکٹر KM1 کا استعمال موٹر کو آگے بڑھانے کے لیے کیا جاتا ہے اور KM2 کو ریورس میں استعمال کیا جاتا ہے۔ حادثاتی طور پر دو کنٹیکٹرز کے بیک وقت آن ہونے سے روکنے کے لیے، جس سے شارٹ سرکٹ ہوتا ہے، سرکٹ استعمال کرتا ہے (تصویر 3، اے دیکھیں) بٹنوں کے SB1 اور SB2 کے دو مداخلت کرنے والے رابطوں کے ساتھ باہمی مکینیکل بلاکنگ۔ بٹن SB1 کو دبانے سے، آن کریں کنڈلی KM1 کا سرکٹ اور کوائل سرکٹ KM2 کو منقطع کریں۔
جب SB1 اور SB2 بٹن ایک ساتھ دبائے جاتے ہیں، تو KM1 اور KM2 کوائلز کے سرکٹس ٹوٹ جاتے ہیں اور کوئی بھی رابطہ کار آن نہیں ہوتا ہے۔ بلاکنگ دو مداخلت کرنے والے رابطوں KM2 اور KM1 کے ذریعے کی جاتی ہے، جو بالترتیب KM1 اور KM2 کے سرکٹس میں شامل ہیں (تصویر 3، بی)۔ اس اسکیم میں انجن کو ریورس کرنے کے لیے، آپ کو پہلے SB بٹن کو دبانا ہوگا۔
انجیر میں سرکٹ۔ 3، c دو پچھلے سرکٹس کا مجموعہ ہے، یعنی ڈبل بلاکنگ ہے۔ایس بی آئی کا بٹن کانٹیکٹر KM1 کو آن کرتا ہے، اور کنٹیکٹر KM2 کے کوائل کا سرکٹ بٹن SB1 کے بیک وقت کھلے رابطے اور بلاک KM1 کے رابطے سے ٹوٹ جاتا ہے۔
شکل 3، d اور e کم طاقت والی ترتیب وار پرجوش موٹروں کو شروع کرنے اور ریورس کرنے کے لیے آسان ترین اسکیمیں دکھاتا ہے... ایسی موٹریں ریوسٹیٹ شروع کیے بغیر نیٹ ورک سے جڑی ہوتی ہیں۔ انجیر میں خاکہ کے مطابق۔ 3، ڈی، سیریز کے جوش و خروش کے ساتھ موٹر کی شروعات اور ریورسنگ دو انٹرمیڈیٹ ریلے کے ذریعے کی جاتی ہے۔ ایل ایم فیلڈ کوائل میں کرنٹ کی سمت کو الٹ کر موٹر کو الٹ دیا جاتا ہے۔ دو سیریز والی فیلڈ وائنڈنگز والی موٹروں میں مخالف سمتوں میں مقناطیسی بہاؤ پیدا کرتے ہیں، سوئچنگ اور ریورسنگ سرکٹ میں صرف دو رابطے ہوتے ہیں (دیکھیں تصویر 3، ای)۔
جیسا کہ زیر غور کنٹرول سکیموں سے دیکھا جا سکتا ہے، گلہری-کیج روٹر اسینکرونس موٹرز کو شروع کرنے اور ریورس کرنے کے عمل کو خودکار کرنا سب سے آسان ہے۔ اس صورت میں، شروع ہونے پر تمام کنٹرول موٹر کو پاور نیٹ ورک سے جوڑنے تک، اور جب رکنے پر - نیٹ ورک سے منقطع ہو جاتا ہے۔
زیادہ پیچیدہ روٹر کے فیز وائنڈنگ کے ساتھ انڈکشن موٹرز کو شروع کرنے، روکنے اور روکنے کا آٹومیشن ہے، بڑھتی ہوئی طاقت کی انڈکشن گلہری-کیج موٹرز، میڈیم اور ہائی پاور کی DC موٹرز، سٹیپ اسٹارٹ کے ساتھ ملٹی اسپیڈ انڈکشن موٹرز، اسی طرح ہم وقت ساز موٹرز کے طور پر۔ یہ انجن کنٹرول ہوتے ہیں۔ وقت کی تقریب کے طور پر, رفتار اور موجودہ.
مندرجہ بالا معاملات کے علاوہ، انجن کنٹرول کیا جا سکتا ہے اور راستے کے اصول کے مطابق، جب انجن شروع ہوتا ہے اور سست ہوجاتا ہے جب کام کرنے والا جسم خلا میں کسی خاص مقام پر پہنچ جاتا ہے۔اس طرح کے افعال انجام دینے والے سسٹمز کو اوپن لوپ سسٹم کہا جاتا ہے کیونکہ ان میں آؤٹ پٹ ویلیو اور ان پٹ ویلیو کے درمیان کوئی فیڈ بیک نہیں ہوتا ہے۔