انجن کی رفتار کو کنٹرول کرنے والے آلات
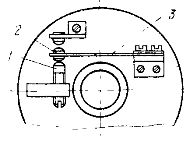
غیر متزلزل الیکٹرک موٹرز کاؤنٹر کرنٹ بریک سرکٹس میں بڑے پیمانے پر استعمال ہوتی ہیں۔ انڈکشن اسپیڈ کنٹرول ریلے... ریلے 5 کا ان پٹ شافٹ، جس پر ایک بیلناکار مستقل مقناطیس 4 لگایا جاتا ہے، الیکٹرک موٹر کے شافٹ سے منسلک ہوتا ہے، جس کی کونیی رفتار کو کنٹرول کرنا ہوتا ہے۔
جب الیکٹرک موٹر گھومتی ہے تو مقناطیسی میدان روٹری سٹیٹر 6 کے شارٹ سرکٹ 3 کی تاروں کو عبور کرتا ہے۔ وائنڈنگ میں ایک EMF شامل ہوتا ہے، جس کی قدر شافٹ کی گردش کی کونیی رفتار کے متناسب ہوتی ہے۔ اس کے اثر کے تحت، کنڈلی میں ایک کرنٹ نمودار ہوتا ہے اور ایک تعامل قوت پیدا ہوتی ہے، جو سٹیٹر 6 کو مقناطیس کی گردش کی سمت میں گھماتی ہے۔
ایک مخصوص گردشی رفتار پر، قوت اتنی بڑھ جاتی ہے کہ لیمیٹر 2، فلیٹ اسپرنگ کی مزاحمت پر قابو پاتے ہوئے، ریلے کے رابطوں کو بدل دیتا ہے۔ ریلے دو رابطہ نوڈس سے لیس ہے: 1 اور 7، جو گردش کی سمت کے لحاظ سے تبدیل ہوتے ہیں۔
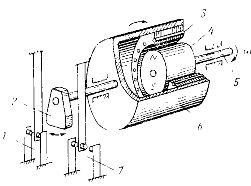
پیکر 1. انڈکٹو اسپیڈ کنٹرول ریلے
انڈکشن اسپیڈ کنٹرول ریلے میں پیچیدہ ڈیزائن اور کم درستگی ہوتی ہے جو صرف موٹے کنٹرول سسٹم کے لیے قابل قبول ہو سکتی ہے۔ تیز رفتار ریگولیشن کی درستگی ایک ٹیچو جنریٹر کے استعمال سے حاصل کی جا سکتی ہے - ایک پیمائش کرنے والی مائیکرو مشین، جس کے ٹرمینلز پر موجود وولٹیج گردش کی رفتار کے براہ راست متناسب ہے۔
Tacho جنریٹرز متغیر رفتار ڈرائیو فیڈ بیک سسٹمز میں وسیع rpm رینج کے ساتھ استعمال ہوتے ہیں اور اس لیے ان میں صرف چند فیصد کی غلطی ہوتی ہے۔ سب سے عام DC tachogenerators ہیں۔
انجیر میں۔ 2 ٹیچو جنریٹر G کا استعمال کرتے ہوئے الیکٹرک موٹر M کے لیے اسپیڈ کنٹرول ریلے کا ایک خاکہ دکھاتا ہے، جس کے آرمیچر سرکٹ میں ایک برقی مقناطیسی ریلے K اور ایک ریگولیٹنگ ریوسٹیٹ R شامل ہوتا ہے۔ جب ٹیچو جنریٹر کے آرمیچر ٹرمینلز پر وولٹیج آپریٹنگ وولٹیج سے زیادہ ہو جاتا ہے، ریلے بیرونی سرکٹ میں آن کیا جاتا ہے۔
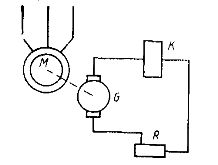
تصویر 2. ٹیچو جنریٹر کے ساتھ سپیڈ کنٹرول ریلے
 شکل 3. ٹیکو میٹر پل کا اسکیمیٹک
شکل 3. ٹیکو میٹر پل کا اسکیمیٹک
جیسے جیسے آرمیچر سرکٹ کی مزاحمت بڑھتی ہے، سرکٹ کی درستگی بڑھ جاتی ہے۔ لہذا، بعض اوقات ریلے کو ایک انٹرمیڈیٹ سیمی کنڈکٹر یمپلیفائر کے ذریعے tachogenerator سے جوڑا جاتا ہے۔ اس مقصد کے لیے ایک مستحکم رسپانس وولٹیج کے ساتھ سیمی کنڈکٹر نان کنٹیکٹ تھریشولڈ عناصر کا استعمال کرنا بھی ممکن ہے۔
اگر DC tachogenerator کو contactless asynchronous tachogenerator سے تبدیل کیا جائے تو سرکٹ کی وشوسنییتا کو بہتر بنایا جا سکتا ہے۔
ایک غیر مطابقت پذیر ٹیچو جنریٹر میں شیشے کی شکل میں بنا ہوا ایک کھوکھلا غیر مقناطیسی روٹر ہوتا ہے۔ سٹیٹر کے ایک دوسرے سے 90 ° کے زاویہ پر دو وائنڈنگ ہوتے ہیں۔ کنڈلیوں میں سے ایک متبادل کرنٹ نیٹ ورک سے منسلک ہے۔ایک سائنوسائیڈل وولٹیج دوسرے وائنڈنگ سے ہٹا دیا جاتا ہے، جو روٹر کی رفتار کے متناسب ہے۔ آؤٹ پٹ وولٹیج کی فریکوئنسی ہمیشہ مینز کی فریکوئنسی کے برابر ہوتی ہے۔
 جدید ڈی سی ایگزیکٹیو موٹرز میں، ٹیچو جنریٹر کو مشین کی طرح ایک ہی ہاؤسنگ میں بنایا جاتا ہے اور اسی شافٹ پر مین موٹر کی طرح نصب کیا جاتا ہے۔ یہ آؤٹ پٹ وولٹیج کی لہر کو کم کرتا ہے اور رفتار کے ضابطے کی درستگی کو بہتر بناتا ہے۔
جدید ڈی سی ایگزیکٹیو موٹرز میں، ٹیچو جنریٹر کو مشین کی طرح ایک ہی ہاؤسنگ میں بنایا جاتا ہے اور اسی شافٹ پر مین موٹر کی طرح نصب کیا جاتا ہے۔ یہ آؤٹ پٹ وولٹیج کی لہر کو کم کرتا ہے اور رفتار کے ضابطے کی درستگی کو بہتر بناتا ہے۔
الیکٹرو میگنیٹک ایکسائٹیشن والے PT-1 قسم کے DC tachogenerators PBST سیریز کی الیکٹرک موٹرز میں عام طور پر استعمال ہوتے ہیں۔ ہائی torque ڈی سی موٹرز میرے پاس ایک بلٹ ان مستقل مقناطیس پرجوش tacho ہے۔
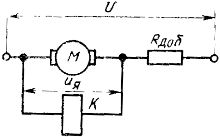
ایسی صورتوں میں جہاں DC موٹر M میں tachogenerator نہیں ہے، اس کی رفتار کو آرمچر EMF کی پیمائش کر کے کنٹرول کیا جا سکتا ہے۔ اس کے لیے، ایک ٹیکومیٹرک برج سرکٹ استعمال کیا جاتا ہے، جو دو ریزسٹرس سے بنتا ہے: R1 اور R2، آرمیچر Ri اور مشین Rdp کے اضافی کھمبے۔ ٹیکومیٹر پل کا آؤٹ پٹ وولٹیج Uout = U1 — Udp، یا
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
آخری مساوات اس شرط کے تحت درست ہے کہ برقی موٹر کا مقناطیسی بہاؤ مستقل ہے۔ tachometric پل کے آؤٹ پٹ پر ایک تھریشولڈ عنصر سمیت، ایک ریلے حاصل کیا جاتا ہے جو گردش کی ایک مخصوص کونیی رفتار پر سیٹ کیا جاتا ہے۔ برش کے رابطے کی مزاحمت کی تغیر اور مزاحمت کے حرارتی عدم توازن کی وجہ سے ٹیکومیٹر پل کی درستگی کم ہے۔
اگر ڈی سی موٹر کسی مصنوعی خصوصیت پر کام کر رہی ہے اور آرمیچر میں ایک بڑی اضافی مزاحمت شامل ہے، تو اسپیڈ ریلے فنکشن کو آرمیچر ٹرمینلز سے منسلک وولٹیج ریلے کے ذریعے انجام دیا جا سکتا ہے۔
الیکٹرک موٹر Uja = E + IjaRja کے آرمچر میں وولٹیج۔
چونکہ I = (U — E) / (Ri + Rext)، ہمیں Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U ملتا ہے، پھر دوسری اصطلاح کو نظرانداز کیا جاسکتا ہے۔ اور آرمیچر ٹرمینل وولٹیج کو براہ راست emf اور موٹر کی گردش کی رفتار کے متناسب سمجھا جا سکتا ہے۔
شکل 4. وولٹیج ریلے کے ساتھ سپیڈ کنٹرول
 پیکر 5. سینٹرفیوگل اسپیڈ کنٹرول ریلے
پیکر 5. سینٹرفیوگل اسپیڈ کنٹرول ریلے
ان کا ڈیزائن بہت سادہ ہے۔ سینٹرفیوگل اسپیڈ سوئچز... ریلے کی بنیاد ایک پلاسٹک فیس پلیٹ 4 ہے، جو شافٹ پر نصب ہے، جس کی گردش کی رفتار کو کنٹرول کرنا ضروری ہے۔ ایک فلیٹ اسپرنگ 3 جس میں بڑے پیمانے پر حرکت پذیر رابطہ 2 اور ایک فکسڈ ایڈجسٹ ایبل رابطہ 1 سامنے کی پلیٹ پر لگایا گیا ہے۔ اسپرنگ خاص اسٹیل سے بنا ہے، جس کی لچک کا ماڈیولس درجہ حرارت کی تبدیلیوں سے عملی طور پر آزاد ہے۔
جب چہرے کی پلیٹ گھومتی ہے تو، ایک سینٹرفیوگل قوت حرکت پذیر رابطے پر کام کرتی ہے، جو گردش کی ایک خاص رفتار سے فلیٹ اسپرنگ کی مزاحمت پر قابو پاتی ہے اور رابطوں کو بدل دیتی ہے۔ کرنٹ رابطہ آلہ کو سلپ رِنگز اور برش کے ذریعے فراہم کیا جاتا ہے، جو کہ تصویر میں نہیں دکھایا گیا ہے۔ اس طرح کے ریلے ڈی سی مائیکرو موٹرز کے لیے رفتار کے استحکام کے نظام میں استعمال ہوتے ہیں۔ اپنی سادگی کے باوجود، سسٹم 2% کے آرڈر پر خرابی کے ساتھ رفتار کو برقرار رکھتا ہے۔
