زخم روٹر موٹر شروع کرنا
غیر مطابقت پذیر موٹر کی ابتدائی خصوصیات اس کے ڈیزائن کی خصوصیات پر منحصر ہیں، خاص طور پر روٹر ڈیوائس پر۔
انڈکشن موٹر کا آغاز مشین کے ایک عارضی عمل کے ساتھ ہوتا ہے، جو روٹر کی آرام کی حالت سے یکساں گردش کی حالت میں منتقلی سے منسلک ہوتا ہے، جس میں موٹر کا ٹارک مزاحمتی قوتوں کے لمحے کو متوازن کرتا ہے۔ مشین کی شافٹ.
غیر مطابقت پذیر موٹر شروع کرتے وقت، سپلائی نیٹ ورک سے برقی توانائی کی کھپت میں اضافہ ہوتا ہے، جو نہ صرف شافٹ پر لگائے جانے والے بریک ٹارک پر قابو پانے اور اسینکرونس موٹر میں ہونے والے نقصانات کو پورا کرنے کے لیے خرچ کیا جاتا ہے، بلکہ ایک مخصوص حرکیات کو بات چیت کرنے کے لیے بھی خرچ کیا جاتا ہے۔ پیداواری یونٹ کے متحرک روابط کو توانائی۔ لہذا، شروع کرتے وقت، انڈکشن موٹر کو بڑھتا ہوا ٹارک تیار کرنا چاہیے۔
روٹر والی انڈکشن موٹر کے لیے، n = 1 کے ساتھ سلپ کرنے کے لیے شروع ہونے والا ٹارک روٹر سرکٹ میں متعارف کرائے جانے والے ایڈجسٹ ریزسٹرس کی فعال مزاحمت پر منحصر ہے۔
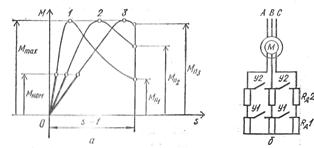
چاول۔ 1۔زخم والے روٹر کے ساتھ تھری فیز غیر مطابقت پذیر موٹر شروع کرنا: a — روٹر سرکٹ میں ریزسٹرس کی مختلف فعال مزاحمتوں پر پھسلن سے زخم والے روٹر کے ساتھ موٹر کے ٹارک انحصار کے گراف، b — ریزسٹروں کو جوڑنے اور رابطوں کو بند کرنے کے لیے ایک سرکٹ روٹر سرکٹ کو تیز کرنا۔
لہذا، بند تیز رفتار رابطوں کے ساتھ U1، U2، یعنی جب سلپ رِنگز کے شارٹ سرکٹ کے ساتھ انڈکشن موٹر شروع کرتے ہیں، تو ابتدائی شروع ہونے والا ٹارک Mn1 = (0.5 -1.0) Mnom اور ابتدائی ابتدائی موجودہ Azn = (4.5 — 7) Aznom اور دوسرے
زخم روٹر کے ساتھ ایک غیر مطابقت پذیر الیکٹرک موٹر کا ایک چھوٹا سا شروع ہونے والا ٹارک پروڈکشن یونٹ اور اس کے نتیجے میں ہونے والی تیز رفتاری کے لیے ناکافی ہو سکتا ہے، اور ایک اہم شروع ہونے والا کرنٹ موٹر وائنڈنگز کو گرم کرنے کا باعث بنے گا، جو اس کی سوئچنگ فریکوئنسی کو محدود کرتا ہے، اور نیٹ ورکس میں کم طاقت کے ساتھ ایک عارضی وولٹیج ڈراپ کی طرف جاتا ہے جو دوسرے ریسیورز کے آپریشن کے لیے ناپسندیدہ ہے۔ یہ حالات اس وجہ سے ہوسکتے ہیں کہ کام کرنے والے میکانزم کو چلانے کے لئے بڑے اسٹارٹ کرنٹ کے ساتھ زخم روٹر انڈکشن موٹرز کے استعمال کو روکتا ہے۔

موٹر کے روٹر سرکٹ میں ایڈجسٹ ایبل ریزسٹرس کا تعارف، جسے اسٹارٹنگ ریزسٹرس کہا جاتا ہے، نہ صرف ابتدائی سٹارٹنگ کرنٹ کو کم کرتا ہے، بلکہ اس کے ساتھ ہی ابتدائی سٹارٹنگ ٹارک کو بڑھاتا ہے، جو زیادہ سے زیادہ ٹارک Mmax تک پہنچ سکتا ہے (orig. 1, a, وکر 3)، اگر فیز واؤنڈ روٹر موٹر کی اہم پرچی
skr = (R2' + Rd') / (X1 + X2′) = 1،
جہاں Rd' — موٹر روٹر وائنڈنگ کے مرحلے میں ریزسٹر کی فعال مزاحمت، سٹیٹر وائنڈنگ کے مرحلے تک کم ہو جاتی ہے۔سٹارٹنگ ریزسٹر کی فعال مزاحمت کو مزید بڑھانا ناقابل عمل ہے، کیونکہ یہ ابتدائی سٹارٹنگ ٹارک کے کمزور ہونے اور سلپ ریجن s> 1 میں زیادہ سے زیادہ ٹارک کے پوائنٹ سے باہر نکلنے کا باعث بنتا ہے، جو روٹر کے تیز ہونے کے امکان کو خارج کر دیتا ہے۔
فیز روٹر موٹر کو شروع کرنے کے لیے ریزسٹروں کی مطلوبہ فعال مزاحمت کا تعین ابتدائی تقاضوں کی بنیاد پر کیا جاتا ہے، جو Mn = (0.1 - 0.4) Mnom، نارمل اگر Mn - (0.5 - 0.75) Mn، اور Mn پر شدید ہو سکتا ہے۔ ≥ میں
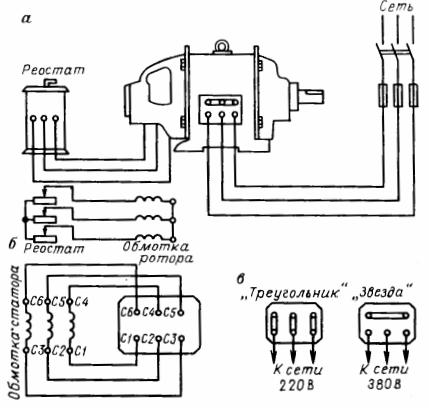
پروڈکشن یونٹ کی سرعت کے دوران فیز واؤنڈ روٹر موٹر کے ساتھ کافی بڑے ٹارک کو برقرار رکھنے کے لیے، عارضی عمل کے دورانیے کو کم کرنے اور موٹر کی حرارت کو کم کرنے کے لیے، فعال مزاحمت کو آہستہ آہستہ کم کرنا ضروری ہے۔ شروع ہونے والے مزاحموں کا۔ ایکسلریشن M (t) کے دوران ٹارک کی قابل اجازت تبدیلی جس کا تعین برقی اور مکینیکل حالات سے ہوتا ہے جو چوٹی کے ٹارک کی حد M> 0.85Mmax کو محدود کرتی ہے، سوئچنگ لمحہ M2 >> Ms (تصویر 2) کے ساتھ ساتھ ایکسلریشن۔

چاول۔ 2. زخم روٹر کے ساتھ تین فیز غیر مطابقت پذیر موٹر کی ابتدائی خصوصیات

سٹارٹنگ ریزسٹرس کی شمولیت کو بالترتیب Y1, Y2 کے یکے بعد دیگرے شامل کرنے سے یقینی بنایا جاتا ہے، بعض اوقات T1, t2، انجن کو شروع کرنے کے لمحے سے شمار کیا جاتا ہے، جب ایکسلریشن کے دوران ٹارک M سوئچنگ مومنٹ M2 کے برابر ہو جاتا ہے۔ لہذا، پورے سٹارٹ اپ کے دوران، تمام چوٹی کے ٹارک ایک جیسے ہوتے ہیں اور تمام سوئچنگ ٹارک ایک دوسرے کے برابر ہوتے ہیں۔
چونکہ زخم روٹر کے ساتھ غیر مطابقت پذیر موٹر کا ٹارک اور کرنٹ آپس میں جڑے ہوئے ہیں، اس لیے روٹر ایکسلریشن I1 = (1.5 - 2.5) Aznom اور سوئچنگ کرنٹ Az2 کے دوران چوٹی کرنٹ کی حد مقرر کرنا ممکن ہے، جس سے سوئچنگ لمحہ M2 کو یقینی بنانا چاہیے۔ > M.° C
سپلائی نیٹ ورک سے زخم روٹر کے ساتھ غیر مطابقت پذیر موٹروں کا رابطہ منقطع کرنا ہمیشہ روٹر سرکٹ کے شارٹ سرکٹ کے ساتھ کیا جاتا ہے تاکہ اسٹیٹر وائنڈنگ کے مراحل میں اوور وولٹیجز کی ظاہری شکل سے بچا جا سکے، جو ان مراحل کے برائے نام وولٹیج سے زیادہ ہو سکتے ہیں۔ 3 - 4 بار، اگر موٹر رک جانے کے وقت روٹر سرکٹ کھلا ہے۔
چاول۔ 3. فیز روٹر کے ساتھ موٹر وائنڈنگز کی کنکشن اسکیم: a — پاور نیٹ ورک سے، b — روٹر، c — ٹرمینل بورڈ پر۔
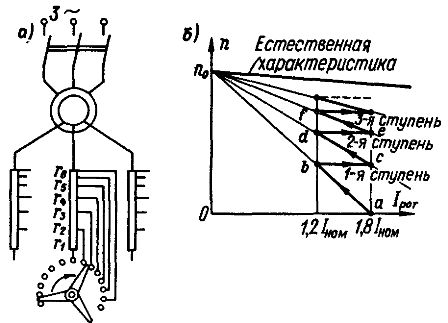
چاول۔ 4. فیز روٹر کے ساتھ موٹر شروع کرنا: a — سوئچنگ سرکٹ، b — مکینیکل خصوصیات