سنگل فیز اور دو فیز اسینکرونس موٹرز
سنگل فیز اسینکرونس موٹرز کے آپریشن کا مقصد، ڈیوائس اور اصول
سنگل فیز انڈکشن موٹرز کم طاقت والی مشینیں ہیں جو ڈیزائن میں تین فیز گلہری-کیج موٹرز سے ملتی جلتی ہیں۔
سنگل فیز اسینکرونس موٹرز سٹیٹر کے انتظام میں تھری فیز موٹرز سے مختلف ہوتی ہیں، جہاں دو فیز وائنڈنگ مقناطیسی سرکٹ کے نالیوں میں واقع ہوتی ہے، جس میں 120 ایل کے فیز ایریا کے ساتھ مین یا ورکنگ فیز ہوتا ہے۔ اولے اور C1 اور C2 کے نشان والے ٹرمینلز کی طرف لے جاتے ہیں، اور 60 el کے فیز ایریا کے ساتھ ایک معاون یا ابتدائی مرحلہ۔ اولے اور B1 اور B2 نشان زد ٹرمینلز کی طرف لے جاتے ہیں (تصویر 1)۔
ان سمیٹنے والے مراحل کے مقناطیسی محور ایک دوسرے کے مقابلے میں ایک زاویہ 0 = 90 el کے ذریعہ آفسیٹ ہوتے ہیں۔ اولے متبادل وولٹیج نیٹ ورک سے منسلک کام کرنے کا مرحلہ روٹر کو گھومنے کا سبب نہیں بن سکتا، کیونکہ اس کا کرنٹ ایک متغیر مقناطیسی میدان کو متحرک کرتا ہے جس میں ہم آہنگی کا ایک مقررہ محور ہوتا ہے، جس کی خصوصیت وقت کے ساتھ ہم آہنگی سے تبدیل ہوتی ہوئی مقناطیسی انڈکشن ہوتی ہے۔
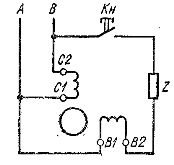
چاول۔ 1. سنگل فیز گلہری-کیج روٹر انڈکشن موٹر کا سرکٹ ڈایاگرام۔
اس فیلڈ کی نمائندگی دو اجزاء سے کی جا سکتی ہے — براہ راست اور معکوس ترتیب کے ایک جیسے سرکلر مقناطیسی میدان، مقناطیسی انڈکشن کے ساتھ گھومتے ہوئے، ایک ہی رفتار سے مخالف سمتوں میں گھومتے ہیں۔ تاہم، جب روٹر کو مطلوبہ سمت میں پہلے سے تیز کیا جاتا ہے، جب کام کا مرحلہ آن ہوتا ہے تو یہ اسی سمت میں گھومتا رہتا ہے۔
 اس وجہ سے، سنگل فیز موٹر کا آغاز سٹارٹ بٹن کو دبانے سے روٹر کو تیز کرنے سے شروع ہوتا ہے، جس کی وجہ سے سٹیٹر وائنڈنگ کے دونوں مرحلوں میں کرنٹ پرجوش ہوتا ہے، جو کہ پیرامیٹر کے لحاظ سے ایک رقم کے حساب سے فیز شفٹ ہوتے ہیں۔ فیز شفٹنگ ڈیوائس Z، ایک ریزسٹر، انڈکٹر یا کپیسیٹر کی شکل میں بنایا گیا ہے، اور الیکٹریکل سرکٹ عناصر جن میں سٹیٹر وائنڈنگ کے آپریٹنگ اور شروع ہونے والے مراحل شامل ہیں۔ یہ دھارے ہوا کے خلا میں مقناطیسی انڈکشن کے ساتھ مشین میں گھومنے والے مقناطیسی میدان کا باعث بنتے ہیں، جو وقتاً فوقتاً اور یک طرفہ طور پر زیادہ سے زیادہ اور کم سے کم قدروں کے اندر تبدیل ہوتے رہتے ہیں، اور اس کے ویکٹر کا اختتام بیضوی شکل کو بیان کرتا ہے۔
اس وجہ سے، سنگل فیز موٹر کا آغاز سٹارٹ بٹن کو دبانے سے روٹر کو تیز کرنے سے شروع ہوتا ہے، جس کی وجہ سے سٹیٹر وائنڈنگ کے دونوں مرحلوں میں کرنٹ پرجوش ہوتا ہے، جو کہ پیرامیٹر کے لحاظ سے ایک رقم کے حساب سے فیز شفٹ ہوتے ہیں۔ فیز شفٹنگ ڈیوائس Z، ایک ریزسٹر، انڈکٹر یا کپیسیٹر کی شکل میں بنایا گیا ہے، اور الیکٹریکل سرکٹ عناصر جن میں سٹیٹر وائنڈنگ کے آپریٹنگ اور شروع ہونے والے مراحل شامل ہیں۔ یہ دھارے ہوا کے خلا میں مقناطیسی انڈکشن کے ساتھ مشین میں گھومنے والے مقناطیسی میدان کا باعث بنتے ہیں، جو وقتاً فوقتاً اور یک طرفہ طور پر زیادہ سے زیادہ اور کم سے کم قدروں کے اندر تبدیل ہوتے رہتے ہیں، اور اس کے ویکٹر کا اختتام بیضوی شکل کو بیان کرتا ہے۔
یہ. بیضوی گھومنے والا مقناطیسی فیلڈ شارٹ سرکیٹ والے روٹر وائنڈنگ کے تاروں میں EMF اور کرنٹ کا پتہ لگاتا ہے، جو اس فیلڈ کے ساتھ تعامل کرتے ہوئے، فیلڈ کی گردش کی سمت میں سنگل فیز موٹر کے روٹر کی سرعت کو یقینی بناتا ہے، اور یہ چند سیکنڈ میں تقریباً معمولی رفتار تک پہنچ جاتا ہے۔
سٹارٹ بٹن کو جاری کرنے سے الیکٹرک موٹر کو ٹو فیز موڈ سے سنگل فیز موڈ میں منتقل کیا جاتا ہے، جس کو متبادل مقناطیسی فیلڈ کے متعلقہ جزو کی طرف سے بھی مدد ملتی ہے، جو اپنی گردش کے دوران پھسلنے کی وجہ سے گھومنے والے روٹر سے قدرے آگے ہوتی ہے۔
پاور نیٹ ورک سے سنگل فیز غیر مطابقت پذیر موٹر کی سٹیٹر وائنڈنگ کے ابتدائی مرحلے کا بروقت منقطع ہونا اس کے ڈیزائن کی وجہ سے ضروری ہے، جو ایک مختصر مدت کے آپریشن کے لیے فراہم کرتا ہے - عام طور پر 3 سیکنڈ تک، جو اس کے طویل قیام کو خارج نہیں کرتا ہے۔ ناقابل قبول حد سے زیادہ گرمی، موصلیت کے جلنے اور نقصان کی وجہ سے بوجھ کے نیچے۔
سنگل فیز غیر مطابقت پذیر موٹرز کے آپریشن کی بھروسے میں اضافہ مشین کے کیس میں ایک سینٹری فیوگل سوئچ جس میں VT اور B2 کے نشان والے ٹرمینلز سے متصل روابط اور ایک تھرمل ریلے جس میں PT اور C1 کے نشان والے ٹرمینلز ہیں (تصویر 2) ج، ڈی)۔
سینٹری فیوگل سوئچ B1 اور B2 کے نشان والے ٹرمینلز سے جڑے سٹیٹر وائنڈنگ کے ابتدائی مرحلے کو خود بخود منقطع کر دیتا ہے جب روٹر ریٹیڈ کے قریب رفتار تک پہنچ جاتا ہے، اور تھرمل ریلے سٹیٹر وائنڈنگ کے دونوں مراحل کو مینز سے منقطع کر دیتا ہے جب ہیٹنگ ہوتی ہے۔ جائز سے زیادہ۔
روٹر کی گردش کی سمت کا الٹ جانا اسٹیٹر وائنڈنگ کے کسی ایک مرحلے میں کرنٹ کی سمت کو تبدیل کرکے حاصل کیا جاتا ہے جب اسٹارٹ بٹن کو سوئچ کرکے اور الیکٹرک موٹر کے ٹرمینلز پر دھاتی پلیٹ کو دوبارہ ترتیب دے کر شروع کیا جاتا ہے (تصویر 1)۔ 2، اے، بی) یا صرف دو ملتے جلتے پلیٹوں کو دوبارہ ترتیب دے کر (تصویر 2، سی، ڈی)۔
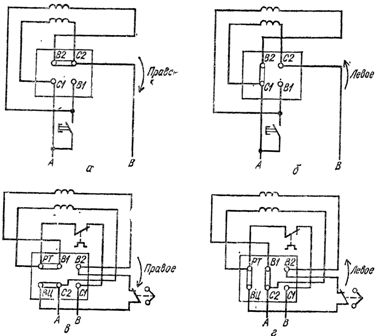
چاول۔ 2. ایک گلہری روٹر کے ساتھ سنگل فیز غیر مطابقت پذیر موٹر کے سٹیٹر وائنڈنگ کے مراحل کے ٹرمینلز کا نشان لگانا اور روٹر کی گردش کے لیے ان کا کنکشن: a, c — دائیں، b، d — بائیں۔
سنگل فیز اور تھری فیز اسینکرونس موٹرز کی تکنیکی خصوصیات کا موازنہ
سنگل فیز غیر مطابقت پذیر موٹرز تھری فیز مشینوں سے مختلف ہوتی ہیں جن میں ریٹیڈ پاور میں ایک کم ابتدائی ٹارک فیکٹر kn = МХ / Mnom اور ایک بڑھے ہوئے ابتدائی کرنٹ فیکٹر ki = Mi / Mnom، جو کہ ابتدائی مرحلے والی سنگل فیز الیکٹرک موٹرز کے لیے ہوتے ہیں۔ بڑھتی ہوئی براہ راست کرنٹ مزاحمت کے ساتھ سٹیٹر وائنڈنگ اور ورکنگ فیز کی کم انڈکٹنس اہم kn — 1.0 — 1.5 اور ki = 5 — 9 ہیں۔
سنگل فیز اسینکرونس موٹرز کی ابتدائی خصوصیات تھری فیز اسینکرونس موٹرز سے بدتر ہیں اس حقیقت کی وجہ سے کہ ایک بیضوی گھومنے والی مقناطیسی فیلڈ سنگل فیز مشینوں کے آغاز پر پرجوش ہوتی ہے جس میں سٹیٹر وائنڈنگ کا ابتدائی مرحلہ دو کے برابر ہوتا ہے۔ غیر یکساں سرکلر گھومنے والے مقناطیسی میدان — براہ راست اور اس کے برعکس، بریک اثر کا سبب بنتا ہے۔
 سٹیٹر وائنڈنگ کے کام کرنے والے اور ابتدائی مرحلے کے الیکٹریکل سرکٹس کے عناصر کے پیرامیٹرز کو منتخب کرکے، یہ ممکن ہے کہ سٹارٹ اپ کے وقت ایک سرکلر گھومنے والے مقناطیسی میدان کے جوش کو یقینی بنایا جائے، جو کہ ایک فیز شفٹنگ عنصر کے ساتھ ممکن ہے۔ ایک مناسب صلاحیت کے ساتھ ایک capacitor کی شکل میں.
سٹیٹر وائنڈنگ کے کام کرنے والے اور ابتدائی مرحلے کے الیکٹریکل سرکٹس کے عناصر کے پیرامیٹرز کو منتخب کرکے، یہ ممکن ہے کہ سٹارٹ اپ کے وقت ایک سرکلر گھومنے والے مقناطیسی میدان کے جوش کو یقینی بنایا جائے، جو کہ ایک فیز شفٹنگ عنصر کے ساتھ ممکن ہے۔ ایک مناسب صلاحیت کے ساتھ ایک capacitor کی شکل میں.
جیسا کہ روٹر کی سرعت مشین کے سرکٹس کے پیرامیٹرز میں تبدیلی کا سبب بنتی ہے، گھومنے والا مقناطیسی میدان سرکلر سے بیضوی شکل میں بدل جاتا ہے، اس طرح موٹر کی ابتدائی خصوصیات کو کم کر دیتا ہے۔ لہذا، تقریباً 0.8 برائے نام کی رفتار سے، الیکٹرک موٹر کے سٹیٹر وائنڈنگ کا ابتدائی مرحلہ دستی طور پر یا خود بخود بند ہو جاتا ہے، جس کے نتیجے میں موٹر سنگل فیز آپریشن میں بدل جاتی ہے۔
سنگل فیز غیر سنکرونس موٹرز جن میں ایک سٹارٹنگ کیپسیٹر ہوتا ہے ان میں ابتدائی سٹارٹنگ ٹارک کا ایک ملٹیپل ہوتا ہے kp = 1.7 — 2.4 اور ایک ملٹیز ابتدائی سٹارٹنگ کرنٹ ki = 3 — 5 ہوتا ہے۔
دو فیز اسینکرونس موٹرز
دو فیز اسینکرونس موٹرز میں، سٹیٹر کے دو فیز 90 ایل کے فیز ایریاز کے ساتھ سمیٹتے ہیں۔ کارکنوں کو سلام۔ وہ سٹیٹر کے مقناطیسی سرکٹ کے نالیوں میں واقع ہیں، تاکہ ان کے مقناطیسی محور 90 el کا زاویہ بنائیں۔ اولے سٹیٹر وائنڈنگ کے یہ مراحل نہ صرف موڑ کی تعداد میں بلکہ ریٹیڈ وولٹیجز اور کرنٹ میں بھی ایک دوسرے سے مختلف ہیں، حالانکہ موٹر کے ریٹیڈ موڈ پر ان کی کل طاقتیں ایک جیسی ہیں۔
سٹیٹر وائنڈنگ کے مراحل میں سے ایک میں ایک مستقل کپیسیٹر Cp (تصویر 3، اے) ہے، جو موٹر کے برائے نام موڈ کے حالات میں ایک سرکلر گھومنے والے مقناطیسی میدان کا جوش فراہم کرتا ہے۔ اس کیپسیٹر کی صلاحیت کا تعین فارمولے سے کیا جاتا ہے:
° Cp = I1sinφ1 / 2πfUn2
جہاں I1 اور φ1- بالترتیب ایک سرکلر گھومنے والے مقناطیسی میدان میں بغیر کپیسیٹر کے سٹیٹر وائنڈنگ کے فیز سرکٹ کے وولٹیج اور کرنٹ کے درمیان کرنٹ اور فیز شفٹ، I اور ti — متبادل کرنٹ کی فریکوئنسی اور سپلائی کا وولٹیج نیٹ ورک، بالترتیب، n- ٹرانسفارمیشن گتانک — اسٹیٹر وائنڈنگ کے مراحل کے موڑ کی مؤثر تعداد کا تناسب، بالترتیب ایک کپیسیٹر کے ساتھ اور بغیر، فارمولے سے متعین
n = kvol2 w2 / ktom 1 w1
جہاں коб2 اور коб1 — w2 اور w1 کی تعداد کے ساتھ سمیٹنے والے اسٹیٹر کے متعلقہ مراحل کے سمیٹنے والے گتانک۔
Capacitor ٹرمینل وولٹیج Uc مینز وولٹیج U کے اوپر ایک سرکلر گھومنے والی مقناطیسی فیلڈ کے ساتھ دو فیز انڈکشن موٹر کے وائنڈنگ فیز کے ساتھ سیریز میں جڑا ہوا ہے اور اس کا تعین مندرجہ ذیل ہے:
Uc = U √1 + n2
برائے نام کے علاوہ کسی موٹر بوجھ میں منتقلی کے ساتھ گھومنے والے مقناطیسی میدان میں تبدیلی ہوتی ہے، جو گول کی بجائے بیضوی بن جاتی ہے۔یہ انجن کی کام کرنے والی خصوصیات کو خراب کرتا ہے، اور جب شروع ہوتا ہے، یہ ابتدائی کو کم کر دیتا ہے ٹارک شروع ہو رہا ہے۔ MP <0.3Mnom تک، مستقل طور پر منسلک کیپسیٹر موٹرز کے استعمال کو محدود کرتے ہوئے صرف ان تنصیبات میں جو ہلکے شروع ہونے والے حالات ہیں۔
ابتدائی ٹارک کو بڑھانے کے لیے، سٹارٹنگ کپیسیٹر Cn کو ورکنگ کیپسیٹر Cp (Fig.3, b) کے ساتھ متوازی طور پر جوڑا جاتا ہے، جس کی گنجائش ورکنگ کپیسیٹر کی صلاحیت سے بہت زیادہ ہوتی ہے اور اس کا انحصار ابتدائی سٹارٹنگ کے سیٹ پر ہوتا ہے۔ ٹارک، جس کو دو یا زیادہ تک بڑھایا جا سکتا ہے۔
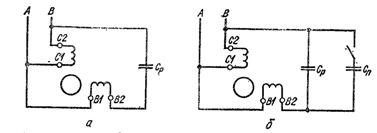
چاول۔ 3. گلہری-کیج روٹر کے ساتھ دو فیز غیر مطابقت پذیر موٹرز کو سوئچ کرنے کی اسکیمیں: a — ایک مستقل طور پر جڑے ہوئے کپیسیٹر کے ساتھ، b — ایک چلنے والے اور شروع ہونے والے کپیسیٹر کے ساتھ۔
جب روٹر کی رفتار 0.6 - 0.7 کی رفتار سے شروع ہوتی ہے، تو اسے گردش کرنے والے مقناطیسی میدان کو بیضوی شکل میں تبدیل کرنے سے بچنے کے لیے بند کر دیا جاتا ہے، جو موٹر کے کام کو خراب کر دیتا ہے۔
اس طرح کی کپیسیٹر موٹرز کے سٹارٹنگ موڈ کو مندرجہ ذیل پیرامیٹرز سے خاص کیا جاتا ہے: kn = 1.7 - 2.4 اور ki = 4 - 6۔
سٹیٹر وائنڈنگ پر ابتدائی پردے والی سنگل فیز موٹرز سے بہتر توانائی کی خصوصیات کی وجہ سے کپیسیٹر موٹرز ممتاز ہیں، اور ان کی پاور فیکٹر، کیپسیٹرز کے استعمال کی بدولت، اسی پاور کی تھری فیز موٹرز سے زیادہ ہے۔
یونیورسل اسینکرونس موٹرز
خودکار کنٹرول کی تنصیبات یونیورسل غیر مطابقت پذیر موٹرز استعمال کرتی ہیں - کم طاقت کی تین فیز مشینیں، جو تین فیز یا سنگل فیز نیٹ ورک سے جڑی ہوتی ہیں۔ سنگل فیز نیٹ ورک سے چلنے پر، موٹرز کی شروعاتی اور آپریٹنگ خصوصیات تھری فیز موڈ میں استعمال ہونے کے مقابلے میں قدرے خراب ہوتی ہیں۔
یو اے ڈی سیریز کی یونیورسل غیر مطابقت پذیر موٹریں دو اور چار قطبوں کے ساتھ تیار کی جاتی ہیں، جن کی تھری فیز موڈ میں برائے نام پاور 1.5 سے 70 ڈبلیو ہوتی ہے، اور سنگل فیز موڈ میں - 1 سے 55 ڈبلیو تک اور متبادل سے کام کرتی ہیں۔ وولٹیج نیٹ ورک جس کی فریکوئنسی 50 Hz کی کارکردگی کے ساتھ ہے η= 0.09 — 0.65۔
سایہ دار یا سایہ دار کھمبوں کے ساتھ سنگل فیز غیر مطابقت پذیر موٹرز
منقسم یا سایہ دار کھمبوں والی سنگل فیز انڈکشن موٹرز میں، ہر قطب کو ایک گہری نالی کے ذریعے دو غیر مساوی حصوں میں تقسیم کیا جاتا ہے اور اس کے چھوٹے حصے پر واقع قطب کے پورے مقناطیسی سرکٹ اور شارٹ سرکیٹ موڑ کو ڈھانپنے والا سنگل فیز وائنڈنگ ہوتا ہے۔
ان موٹروں کے روٹر میں شارٹ سرکٹ وائنڈنگ ہوتی ہے۔ سائنوسائیڈل وولٹیج میں سٹیٹر وائنڈنگ کو شامل کرنے کے ساتھ اس میں کرنٹ کا قیام اور ہم آہنگی کے ایک مقررہ محور کے ساتھ متبادل مقناطیسی فیلڈ کا جوش شامل ہے، جو شارٹ سرکیٹڈ لوپس میں متعلقہ emf اور کرنٹ کو اکساتا ہے۔
شارٹ سرکٹ کرنٹ کے زیر اثر، متعلقہ m.d.s ایک مقناطیسی میدان کو اکساتی ہے، جو اکثر ڈھال والے کھمبوں میں مرکزی مقناطیسی میدان کو مضبوط اور کمزور ہونے سے روکتا ہے۔ قطبوں کے ڈھال والے اور غیر ڈھال والے حصوں کے مقناطیسی میدان وقت کے ساتھ مرحلے سے باہر ہیں اور، خلا میں منتقل ہونے سے، نتیجے میں بیضوی گھومنے والا مقناطیسی میدان تشکیل دیتا ہے جو قطب کے غیر محفوظ حصے کے مقناطیسی محور سے مقناطیسی محور کی سمت میں حرکت کرتا ہے۔ اس کے ڈھال والے حصے کا۔
روٹر وائنڈنگ میں شامل کرنٹ کے ساتھ اس فیلڈ کا تعامل ابتدائی ٹارک Mn = (0.2 - 0.6) Mnom کی ظاہری شکل کا سبب بنتا ہے اور روٹر کی شرح شدہ رفتار پر تیز ہوجاتا ہے، اگر موٹر شافٹ پر بریک لگانے والا ٹارک لاگو نہیں ہونا چاہئے شروع ہونے والے ٹارک سے تجاوز کرنا۔
تقسیم یا سایہ دار کھمبوں کے ساتھ سنگل فیز غیر مطابقت پذیر موٹرز کے ابتدائی ابتدائی اور زیادہ سے زیادہ ٹارک کو بڑھانے کے لیے، ان کے کھمبوں کے درمیان سٹیل شیٹ کے مقناطیسی شنٹ رکھے جاتے ہیں، جو گھومنے والے مقناطیسی میدان کو سرکلر کے قریب لاتا ہے۔
شیڈڈ پول موٹرز غیر الٹنے والے آلات ہیں جو بار بار شروع ہونے، اچانک رکنے اور طویل عرصے تک تاخیر کا باعث بن سکتے ہیں۔ وہ 0.5 سے 30 W تک دو- اور چار قطبی ریٹیڈ پاور کے ساتھ اور 300 W تک بہتر ڈیزائن کے ساتھ متبادل وولٹیج نیٹ ورک سے 50 Hz کی فریکوئنسی کے ساتھ ηnom = 0.20 — 0.40 کی کارکردگی کے ساتھ بنائے گئے ہیں۔
یہ بھی پڑھیں: سیلسینس: مقصد، آلہ، عمل کا اصول
