مخالف بریک کے ساتھ ایک غیر مطابقت پذیر الیکٹرک ڈرائیو کا منصوبہ
 جب، تکنیکی عمل کی شرائط کے مطابق، برقی موٹر کے بریک کے عمل کو نمایاں طور پر تیز کرنا ضروری ہو، تو ریورس بریک کا استعمال کیا جاتا ہے۔ ایک الٹنے والی غیر مطابقت پذیر الیکٹرک ڈرائیو کا خاکہ جس میں مخالف بریک لگائی جاتی ہے تصویر 1 میں دکھایا گیا ہے۔ 1. الیکٹرک ڈرائیو کے آپریٹنگ حالات کی بنیاد پر، کنٹرول سرکٹ کو TC ٹرانسفارمر سے کم معیاری وولٹیج فراہم کیا جاتا ہے۔
جب، تکنیکی عمل کی شرائط کے مطابق، برقی موٹر کے بریک کے عمل کو نمایاں طور پر تیز کرنا ضروری ہو، تو ریورس بریک کا استعمال کیا جاتا ہے۔ ایک الٹنے والی غیر مطابقت پذیر الیکٹرک ڈرائیو کا خاکہ جس میں مخالف بریک لگائی جاتی ہے تصویر 1 میں دکھایا گیا ہے۔ 1. الیکٹرک ڈرائیو کے آپریٹنگ حالات کی بنیاد پر، کنٹرول سرکٹ کو TC ٹرانسفارمر سے کم معیاری وولٹیج فراہم کیا جاتا ہے۔
سرکٹ رفتار کنٹرول کے ساتھ کاؤنٹر سوئچنگ بریک کے ذریعے الیکٹرک ڈرائیو کو براہ راست شروع کرنے، ریورس کرنے اور روکنے کی اجازت دیتا ہے۔ اس معاملے میں الیکٹرو مکینیکل رفتار کنٹرول ریلے SR موٹر شافٹ پر نصب. یہ رفتار کے ساتھ اپنے SR (B) یا SR (H) رابطوں کو بند کر دیتا ہے۔

کنٹرول کمانڈ سرکٹ کو بھیجے جاتے ہیں۔ کنٹرول کے بٹن SB2 ("فارورڈ")، SVZ ("ریورس") اور SB1 ("اسٹاپ") ٹیکنالوجی کے لیے درکار گردش کی سمت پر منحصر ہے۔ سٹیٹر وائنڈنگ کو وولٹیج رابطہ کار KM1 (B)، فیز سیکوینس ABC اور KM2 (H)، فیز سیکوینس CBA کے ذریعے فراہم کیا جاتا ہے۔
الیکٹرک ڈرائیو SB1 (C) کا اسٹاپ بٹن بریک ریلے KT کے کوائل سرکٹ میں شامل ہے، جو گردش کی کسی بھی سمت میں اینٹی روٹیشن بریک موڈ کو منظم کرتا ہے۔ کنٹیکٹرز KM1 (B) اور KM2 (N) کے کوائل سرکٹس میں بلاکنگ رابطے 5-6 (SB3)، 6-7 (KM2) اور 12-13 (SB2) 13-14 (KM1) ہیں، جو بیک وقت آپریشن کو روکتے ہیں۔ ان رابطہ کاروں میں سے۔
الیکٹرک ڈرائیو کا انتظام اس طرح کیا جاتا ہے۔ جب SB2-B بٹن دبایا جاتا ہے تو، کوائل KM1 کا سپلائی سرکٹ بن جاتا ہے، کنٹیکٹر KM1 چالو ہو جاتا ہے اور غیر مطابقت پذیر الیکٹرک موٹر کے سٹیٹر وائنڈنگ کو سپلائی نیٹ ورک سے جوڑتا ہے، اور براہ راست آغاز ہوتا ہے۔
جب KM1-B رابطہ کار فعال ہو جاتا ہے، تو رابطہ 4-5 (KM1-B) بند ہو جاتا ہے، SB2-B بٹن کو نظرانداز کرتے ہوئے، اور رابطہ کنندہ خود سے متحرک ہو جاتا ہے۔ اسی وقت، بلاک کرنے والا رابطہ 13-14 (KM-B) کوائل KM2-N کے سرکٹ میں کھلتا ہے، اور رابطہ 3-15 (KM1-B) بریک ریلے KT کے کوائل کے سرکٹ میں بند ہو جاتا ہے۔ . جب موٹر تیز ہوتی ہے، رفتار کنٹرول ریلے اپنے رابطہ 11-13 (SR-H) کو چالو اور بند کر دیتا ہے، اگر SBl-C (اسٹاپ) بٹن دبایا جائے تو ڈرائیو کو روکنے کے لیے سرکٹ تیار کرتا ہے۔
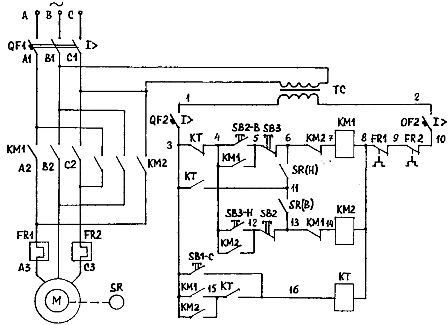
چاول۔ 1. مخالف بریک کے ساتھ الٹنے والی غیر مطابقت پذیر الیکٹرک ڈرائیو کی اسکیم
الیکٹرک ڈرائیو کو ریورس کرنے کے لیے، SB3-H بٹن دبائیں۔ پھر بلاک کرنے والا رابطہ 5-6 (SB3) کنڈلی KM1 کے سرکٹ میں کھلتا ہے۔ کنٹریکٹر KM1 موٹر سٹیٹر کو مینز سے منقطع کر دیتا ہے۔ ایک ہی وقت میں، بلاک کرنے والا رابطہ 13-14 (KM1) کنڈلی KM2 کے سرکٹ میں بند ہو جاتا ہے۔
KM2 وائنڈنگ پاور حاصل کرتی ہے، اور KM2 کنٹیکٹر سٹیٹر وائنڈنگ کو مینز سے جوڑتا ہے، مرحلے کی ترتیب کو تبدیل کرتا ہے۔الیکٹرک موٹر کا مقناطیسی میدان مخالف سمت میں گھومنا شروع کر دیتا ہے، اور جڑواں کے ذریعے روٹر اسی سمت میں گھومتا ہے۔ لہٰذا، انڈکشن موٹر اس وقت تک سٹاپ-اگینسٹ-روٹیشن موڈ میں چلی جاتی ہے جب تک کہ یہ مکمل طور پر رک نہ جائے، اور پھر "ریورس" سمت میں تیز ہو جائے۔
ریورس ایکسلریشن کے دوران، سپیڈ کنٹرول ریلے اپنا رابطہ 11-6 (SR-B) بند کر دیتا ہے، سرکٹ کو رکنے کے لیے تیار کرتا ہے۔ بریک ریلے KT کے کوائل سرکٹ میں، کنٹیکٹر 3-15 (KM2) بند ہو جاتا ہے۔
جب SB1-C بٹن دبایا جاتا ہے تو، CT بریک ریلے کوائل کو متحرک کیا جاتا ہے اور CT ریلے کو متحرک کیا جاتا ہے، رابطہ 3-4 (CT) کھولتا ہے اور رابطہ 3-11 (CT) کو بند کرتا ہے۔ کنٹریکٹر KM2 پاور کھو دیتا ہے اور سٹیٹر وائنڈنگ کو مینز سے منقطع کر دیتا ہے۔ اس صورت میں، کنٹیکٹر KM2 اپنا بلاک کرنے والے کانٹیکٹ 6-7 (KM2) کو وائنڈنگ KM1 کے سرکٹ میں بند کر دیتا ہے۔
کنٹیکٹر KM1 کو چالو کیا جاتا ہے کیونکہ کوائل KM 1-B سرکٹ 3-1 (KT)، 11-6 (SR-H)، 6-7 (KM2) کے ذریعے پاور حاصل کرتی ہے۔ سٹیٹر وائنڈنگ براہ راست مرحلے کی گردش، «آگے» کے ذریعے جڑی ہوئی ہے، اور روٹر «پیچھے» سمت میں جڑتا کے ذریعے گھومتا ہے۔ لہذا، انڈکشن موٹر مخالف بریک موڈ میں جاتا ہے. بریک موڈ میں الیکٹرک ڈرائیو کا بریک ٹارک

جب رفتار صفر کے قریب گر جائے گی، تو SR اسپیڈ کنٹرول ریلے اپنا رابطہ 3-11 (KT) کھول دے گا اور KMl کوائل کی طاقت ختم ہو جائے گی اور KM1 رابطہ کار سٹیٹر وائنڈنگ کو کم کر دے گا۔