بند خودکار کنٹرول سسٹم
 کلوزڈ آٹومیٹک کنٹرول سسٹم (ACS) استعمال کیے جانے والے آلات اور آٹومیشن کی مکمل ہونے میں کھلے سرکٹس سے مختلف ہیں۔ ACS کھلنے کے ساتھ، مرکزی یونٹ (بشمول کنٹرول آلات) کو برقی تنصیب (ڈرائیونگ موٹر، چلانے والی مشین) کے اصل آپریٹنگ موڈ کے بارے میں معلومات نہیں ملتی ہیں۔
کلوزڈ آٹومیٹک کنٹرول سسٹم (ACS) استعمال کیے جانے والے آلات اور آٹومیشن کی مکمل ہونے میں کھلے سرکٹس سے مختلف ہیں۔ ACS کھلنے کے ساتھ، مرکزی یونٹ (بشمول کنٹرول آلات) کو برقی تنصیب (ڈرائیونگ موٹر، چلانے والی مشین) کے اصل آپریٹنگ موڈ کے بارے میں معلومات نہیں ملتی ہیں۔
ایک بند ASUB میں، معلومات کو کنٹرول عناصر تک پہنچایا جاتا ہے، جس کے ساتھ مناسب کمانڈ سگنلز جمع ہوتے ہیں۔ ایسی معلومات کو منتقل کرنے والا سرکٹ کنٹرول لوپ کو بند کر دیتا ہے، بند ACS یا فیڈ بیک ACS بناتا ہے۔
بند اور کھلے ACS کے درمیان فرق کو جنریٹر موٹر (G-D) سسٹم میں برقی موٹر کی رفتار کو کنٹرول کرنے کی مثال سے سمجھا جا سکتا ہے۔ ACS کھلنے کے ساتھ (تصویر 1، a)، الیکٹرک موٹر کی سیٹ سپیڈ دستی طور پر پوٹینشیومیٹر P کے ذریعے سیٹ کی جاتی ہے۔ رفتار کی ایڈجسٹمنٹ بصری طور پر ٹیکو میٹر کے ذریعے کی جاتی ہے، جو TG tachogenerator سے چلتا ہے۔ سیٹ پوائنٹ سے کسی بھی رفتار کے انحراف کو آپریٹر پوٹینشیومیٹر سلائیڈر پر عمل کرکے ختم کر دیتا ہے۔
بند ACS میں (تصویر۔1، b) TG tachogenerator کا آرمچر OVG جنریٹر کے اتیجیت سرکٹ میں شامل ہے، ایک بند یا فیڈ بیک سسٹم بناتا ہے (اس معاملے میں اسپیڈ فیڈ بیک کے ساتھ)۔
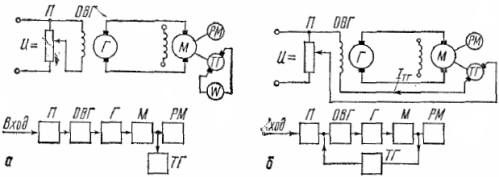
چاول۔ 1. G -M سسٹم میں الیکٹرک موٹر کنٹرول سرکٹ: a — اوپن ACS، b — بند ACS
ایک بند سرکٹ میں tachogenerator (Aztg) کے ذریعے پیدا ہونے والا کرنٹ پوٹینشیومیٹر (Azn) کے کرنٹ کی طرف جاتا ہے اور اس کے نتیجے میں سرکٹ میں ان کرنٹ کے ہندسی فرق کے برابر ہوتا ہے۔ پوٹینشیومیٹر کے سلائیڈر کا استعمال کرتے ہوئے، آپریٹر OVG کے اتیجیت کنڈلی میں نتیجے میں آنے والے کرنٹ کی قدر متعین کرتا ہے، جس پر برقی موٹر کی متعلقہ رفتار فراہم کی جاتی ہے۔ یہیں پر آپریٹر کا کردار ختم ہوتا ہے۔ مستقبل میں، نظام خود بخود ایک خاص درستگی کے ساتھ الیکٹرک ڈرائیو کے آپریشن کے سیٹ موڈ کو برقرار رکھتا ہے۔
فرض کریں کہ لوڈ اسپائک کے نتیجے میں، برقی موٹر کی رفتار مخصوص کے مقابلے میں کم ہو گئی ہے۔ رفتار میں کمی ٹیچو جنریٹر کی رفتار اور اس کے ٹرمینلز پر وولٹیج میں اسی طرح کی کمی کے ساتھ ہے۔ یہ، بدلے میں، فیڈ بیک سرکٹ میں موجودہ Aztg میں کمی کا باعث بنے گا، اور potentiometer کے سلائیڈر کی ایک مخصوص پوزیشن میں - جنریٹر کے جوش و خروش کے نتیجے میں آنے والے کرنٹ میں اضافہ۔ جنریٹر وولٹیج اور موٹر کی رفتار اسی کے مطابق بڑھے گی۔
رفتار اور وولٹیج بڑھانے کا عمل اس وقت تک جاری رہے گا جب تک فیڈ بیک لوپ میں کرنٹ سیٹ ویلیو تک نہیں پہنچ جاتا اور موٹر کی رفتار سیٹ ویلیو تک نہیں پہنچ جاتی۔
خودکار کنٹرول سسٹم کے تجزیہ میں، فنکشن چارٹس… انجیر میں۔ACS کی 2 ٹرانسمیشن فنکشنل اسکیم، جس میں درج ذیل عناصر شامل ہیں:
1 - اہم آلہ جو آپریشن کا موڈ سیٹ کرتا ہے، کمانڈ دیتا ہے، پلس یا سگنل شروع کرتا ہے،
2 - موازنہ کا عنصر۔ اس میں ماسٹر کی طرف سے سگنل X1، سگنل X0 شامل ہے، جو کنٹرول شدہ قدر کی رفتار یا سطح کا تعین کرتا ہے۔ نویں اہم فیڈ بیک عنصر کے سگنل کو مدنظر رکھتے ہوئے، عنصر 2 موصول ہونے والے سگنلز کا موازنہ کرتا ہے اور اضافی درست کردہ سگنل X2 بھیجتا ہے،
3 - تبدیل کرنے والا عنصر، سگنل آپشن اسے دوسری شکل میں تبدیل کرتا ہے، جو مزید ترسیل کے لیے زیادہ آسان ہے۔ مثال کے طور پر، سگنل X2 ہائیڈرولک (نیومیٹک، مکینیکل) پریشر کی صورت میں فراہم کیا جاتا ہے۔ عنصر 3 اسے برقی رو میں تبدیل کرتا ہے۔ چونکہ اس قسم کی تبدیلی کے لیے اضافی توانائی کی ضرورت پڑ سکتی ہے، اس لیے عنصر 3 پی ای توانائی کے منبع سے منسلک ہوتا ہے،
4 — عنصر کو شامل کرتے ہوئے، اسے دو سگنل موصول ہوتے ہیں: اصلاحی عنصر (میموری عنصر) سے X3 اور X8 8۔ ان سگنلز کا خلاصہ عنصر 4 سے کیا جاتا ہے اور اگلے عنصر پر بھیجا جاتا ہے،
5 — ایمپلیفائنگ عنصر، ان پٹ سگنل X1 کمزور ہو سکتا ہے اور بعد میں ٹرانسمیشن کے لیے اسے بڑھانا ضروری ہے۔ یہ عنصر 5 کے ذریعے کیا جاتا ہے جو PE پاور سورس سے منسلک ہوتا ہے،
6 - ایگزیکٹو عنصر، موصول ہونے والے سگنل پر عمل کرتا ہے (الیکٹرک موٹر، برقی مقناطیسی ریلے، سرو موٹر)،
7 - سایڈست آبجیکٹ یا ورکنگ مشین۔
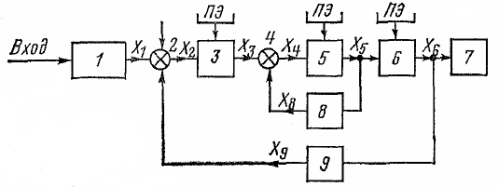
چاول۔ 2. ACS کا فنکشنل ڈایاگرام
ہر آٹومیشن عنصر ایک انرجی کنورٹر ہے، جس کے ان پٹ پر ویلیو X' لگائی جاتی ہے، اور ویلیو X کو آؤٹ پٹ سے ہٹا دیا جاتا ہے۔ "ایک ساکن حالت میں ہر عنصر کے لیے ایک مخصوص انحصار ہوتا ہے" (X')، جسے جامد خصوصیت کہا جاتا ہے۔
ایک بند خودکار کنٹرول سسٹم فیڈ بیک کی موجودگی کی خصوصیت رکھتا ہے۔ اس میں کم از کم ایک فیڈ بیک لوپ ہے جو سسٹم کے آؤٹ پٹ کو اس کے ان پٹ سے جوڑتا ہے۔ اس کے علاوہ، انفرادی ACS عناصر کے آؤٹ پٹ اور ان پٹ کو جوڑتے ہوئے، نام نہاد اندرونی تاثرات ہوسکتے ہیں۔
تاثرات کو سخت اور لچکدار میں تقسیم کیا گیا ہے۔ سخت رکاوٹیں نظام کے آپریشن کے عارضی اور ساکن دونوں طریقوں میں کام کرتی ہیں، لچکدار — صرف عارضی میں۔ مثبت اور منفی آراء کے درمیان فرق کریں۔ جیسے جیسے ریگولیٹڈ ویلیو بڑھتی ہے، مثبت کنکشن اس کو اور بھی بڑھاتا ہے، اور منفی، اس کے برعکس، کم ہوتا ہے۔ تاثرات گردش کے زاویہ، رفتار، وولٹیج، کرنٹ وغیرہ کے متناسب سگنل منتقل کر سکتے ہیں۔ اور اس کے مطابق زاویہ، رفتار، وولٹیج، موجودہ فیڈ بیکس کہلاتے ہیں۔ مزید تفصیلات کے لیے یہاں دیکھیں: آٹومیشن سسٹم کے عناصر
آپریشن کے اصول کے مطابق، ACS کو تین گروہوں میں تقسیم کیا جا سکتا ہے:
-
مسلسل آپریشن جس میں کنٹرول شدہ اور سیٹ اقدار کے درمیان تعلق نہیں ٹوٹا ہے،
-
تسلسل کی کارروائی، جس میں کنٹرول شدہ اور سیٹ اقدار کے درمیان تعلق باقاعدہ وقفوں سے ہوتا ہے،
-
ریلے ایکشن جہاں مواصلت صرف اس وقت ہوتی ہے جب کوئی قدر ایک خاص قدر تک پہنچ جاتی ہے۔
اس قانون پر منحصر ہے جس کے مطابق ایک دی گئی قدر وقت کے ساتھ تبدیل ہوتی ہے، ACS کو بھی تین گروہوں میں تقسیم کیا جا سکتا ہے:
-
مستقل یا کم سیٹ پوائنٹ سسٹم جس میں خود کار طریقے سے کنٹرول شدہ قدر کو مستقل رکھا جاتا ہے۔ یہ استحکام کے نظام ہیں، جو بنیادی طور پر خودکار کنٹرول سسٹم (ACS) ہیں،
-
ایسے نظام جن میں ہدف کی قدر کو ایک مخصوص، پہلے سے طے شدہ پروگرام کے مطابق تبدیل کیا جاتا ہے۔ یہ ایک سافٹ ویئر مینجمنٹ سسٹم ہے،
-
ایسے نظام جن میں ایک دی گئی قدر وسیع پیمانے پر اور ایک صوابدیدی قانون کے مطابق مختلف ہو سکتی ہے، یعنی ٹریکنگ سسٹمز.