جدید برش لیس ڈی سی موٹرز
سیمی کنڈکٹر الیکٹرانکس میں نمایاں پیشرفت اور طاقتور نیوڈیمیم میگنےٹ بنانے کی ٹیکنالوجی کی بدولت، برش لیس ڈی سی موٹرز آج کل بڑے پیمانے پر استعمال ہوتی ہیں۔ وہ واشنگ مشین، ویکیوم کلینر، پنکھے، ڈرون وغیرہ میں استعمال ہوتے ہیں۔
اور اگرچہ بغیر برش موٹر کے چلانے کے اصول کا خیال 19ویں صدی کے اوائل میں ظاہر کیا گیا تھا، لیکن یہ سیمی کنڈکٹر دور کے آغاز تک انتظار کرتا رہا، جب ٹیکنالوجیز کے عملی نفاذ کے لیے تیار ہو گئیں۔ یہ دلچسپ اور موثر تصور، جس نے برش کے بغیر ڈائریکٹ کرنٹ موٹرز کو اتنی ہی وسیع پیمانے پر چلنے کی اجازت دی جتنی کہ وہ آج کرتے ہیں۔ …
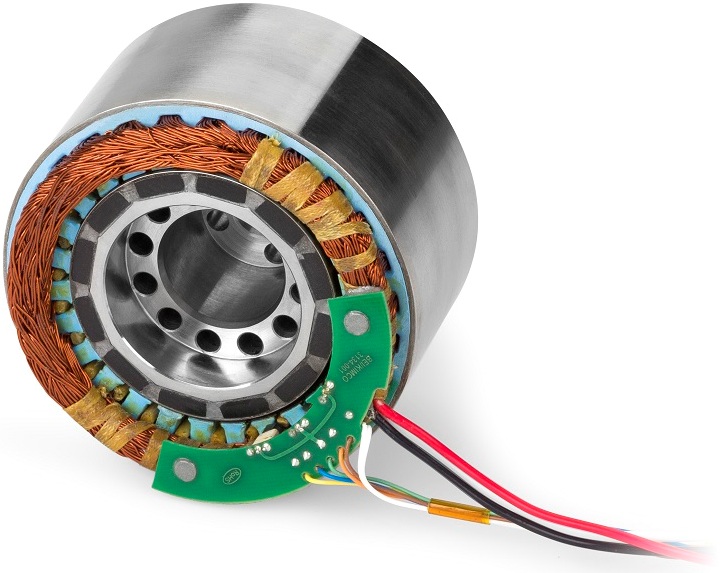
انگریزی ورژن میں انہیں اس قسم کے انجن کہا جاتا ہے۔ BLDC موٹر - برش کے بغیر DC موٹرز - برش کے بغیر ڈی سی موٹر۔ موٹر روٹر پر مشتمل ہے۔ مستقل میگنےٹ، اور ورکنگ وائنڈنگز سٹیٹر پر واقع ہیں، یعنی BLDC موٹر ڈیوائس کلاسک برشڈ موٹر کے بالکل برعکس ہے۔ BLDC موٹر کو ایک الیکٹرانک کنٹرولر کے ذریعے کنٹرول کیا جاتا ہے جسے کہا جاتا ہے۔ ESC - الیکٹرانک اسپیڈ کنٹرولر - الیکٹرانک کروز کنٹرول۔
الیکٹرانک ریگولیٹر اور اعلی کارکردگی
الیکٹرانک ریگولیٹر برش لیس موٹر کو فراہم کی جانے والی برقی توانائی کو آسانی سے مختلف ہونے دیتا ہے۔ مزاحمتی اسپیڈ گورنرز کے آسان ورژن کے برعکس، جو موٹر کے ساتھ سیریز میں مزاحمتی بوجھ کو جوڑ کر طاقت کو محدود کرتے ہیں، جو اضافی طاقت کو حرارت میں تبدیل کرتا ہے، الیکٹرانک اسپیڈ کنٹرول فراہم کی جانے والی برقی طاقت کو ضائع کیے بغیر نمایاں طور پر اعلی کارکردگی فراہم کرتا ہے۔ غیر ضروری ہیٹنگ کے لیے توانائی۔ ..
برش لیس ڈی سی موٹر کو درجہ بندی کیا جاسکتا ہے۔ خود ہم وقت ساز ہم وقت ساز موٹر، جہاں ایک چنگاری نوڈ جس کو باقاعدہ دیکھ بھال کی ضرورت ہوتی ہے مکمل طور پر بند کر دیا جاتا ہے۔ جمع کرنے والا… کلیکٹر کا کام الیکٹرانکس کے ہاتھ میں ہوتا ہے، جس کی وجہ سے پروڈکٹ کا پورا ڈیزائن بہت آسان اور زیادہ کمپیکٹ ہو جاتا ہے۔
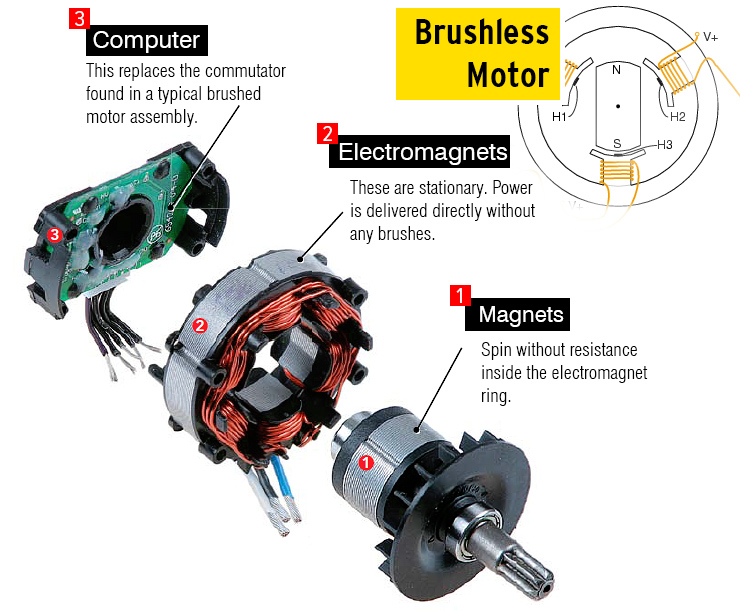
برش کو دراصل الیکٹرانک سوئچز سے تبدیل کیا جاتا ہے، جس میں ہونے والے نقصانات مکینیکل سوئچنگ کے مقابلے میں بہت کم ہوتے ہیں۔ روٹر پر طاقتور نیوڈیمیم میگنےٹ شافٹ پر زیادہ ٹارک کی اجازت دیتے ہیں۔ اور ایسا انجن اپنے کلیکٹر پیشرو سے کم گرم ہوتا ہے۔
نتیجے کے طور پر، انجن کی کارکردگی بہترین ہے، اور طاقت فی کلوگرام وزن زیادہ ہے، اس کے علاوہ روٹر کی رفتار کے ضابطے کی کافی وسیع رینج اور پیدا ہونے والے ریڈیو مداخلت کی تقریباً مکمل غیر موجودگی۔ ساختی طور پر، اس قسم کے انجن پانی اور جارحانہ ماحول میں کام کرنے کے لیے آسانی سے ڈھال لیتے ہیں۔
الیکٹرانک کنٹرول یونٹ برش کے بغیر ڈی سی موٹر کا ایک بہت اہم اور مہنگا حصہ ہے، لیکن اس کو ختم نہیں کیا جا سکتا۔اس آلے سے، انجن کو طاقت ملتی ہے، جس کے پیرامیٹرز بیک وقت رفتار اور طاقت دونوں کو متاثر کرتے ہیں جو انجن بوجھ کے تحت تیار کرنے کے قابل ہوگا۔
یہاں تک کہ اگر گردش کی رفتار کو ایڈجسٹ کرنے کی ضرورت نہیں ہے، تب بھی ایک الیکٹرانک کنٹرول یونٹ کی ضرورت ہے، کیونکہ یہ نہ صرف کنٹرول کا کام کرتا ہے، بلکہ اس میں بجلی کی فراہمی کا جزو بھی ہوتا ہے۔ ہم کہہ سکتے ہیں کہ ESC کا ایک ینالاگ ہے۔ غیر مطابقت پذیر AC موٹرز کے لیے فریکوئنسی کنٹرولرخاص طور پر برش لیس ڈی سی موٹر کو طاقت دینے اور کنٹرول کرنے کے لیے ڈیزائن کیا گیا ہے۔
BLDC موٹر کنٹرول
یہ سمجھنے کے لیے کہ BLDC موٹر کو کیسے کنٹرول کیا جاتا ہے، آئیے سب سے پہلے یاد رکھیں کہ ایک کمیوٹیٹر موٹر کیسے کام کرتی ہے۔ اس کے مرکز میں مقناطیسی میدان میں کرنٹ کے ساتھ فریم کی گردش کا اصول.
ہر بار جب کرنٹ کے ساتھ فریم گھومتا ہے اور توازن کی پوزیشن پاتا ہے، کمیوٹر (کلیکٹر کے خلاف دبائے جانے والے برش) فریم کے ذریعے کرنٹ کی سمت بدلتا ہے اور فریم جاری رہتا ہے۔ یہ عمل اس وقت دہرایا جاتا ہے جب فریم کھمبے سے کھمبے کی طرف جاتا ہے۔ صرف کلیکٹر موٹر میں ایسے بہت سے فریم ہوتے ہیں اور مقناطیسی قطبوں کے کئی جوڑے ہوتے ہیں، یہی وجہ ہے کہ برش کلیکٹر میں دو نہیں بلکہ کئی رابطے ہوتے ہیں۔
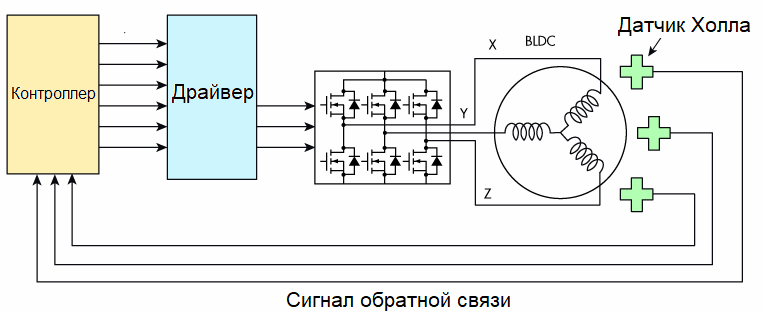
ECM ایسا ہی کرتا ہے۔ جیسے ہی روٹر کو توازن کی پوزیشن سے ہٹنا پڑتا ہے یہ مقناطیسی میدان کی قطبیت کو الٹ دیتا ہے۔ صرف کنٹرول وولٹیج روٹر کو نہیں بلکہ سٹیٹر وائنڈنگز کو فراہم کیا جاتا ہے، اور یہ صحیح وقت (روٹر کے مراحل) پر سیمی کنڈکٹر سوئچ کی مدد سے کیا جاتا ہے۔
یہ واضح ہے کہ برش لیس موٹر کے سٹیٹر وائنڈنگز کو کرنٹ صحیح وقت پر فراہم کیا جانا چاہیے، یعنی جب روٹر کسی خاص معلوم پوزیشن میں ہو۔ ایسا کرنے کے لیے درج ذیل میں سے ایک طریقہ استعمال کریں۔پہلا روٹر پوزیشن سینسر پر مبنی ہے، دوسرا کنڈلیوں میں سے ایک کے EMF کی پیمائش کرنا ہے جو فی الحال طاقت حاصل نہیں کر رہا ہے۔
سینسر مختلف ہیں، مقناطیسی اور نظری، سب سے زیادہ مقبول مقناطیسی سینسر ہیں۔ ہال اثر… دوسرا طریقہ (EMF پیمائش پر مبنی)، اگرچہ مؤثر ہے، کم رفتار اور شروع ہونے پر قطعی کنٹرول کی اجازت نہیں دیتا ہے۔ دوسری طرف، ہال کے سینسر تمام طریقوں میں زیادہ درست کنٹرول فراہم کرتے ہیں۔ تھری فیز BLDC موٹرز میں اس طرح کے تین سینسر ہیں۔
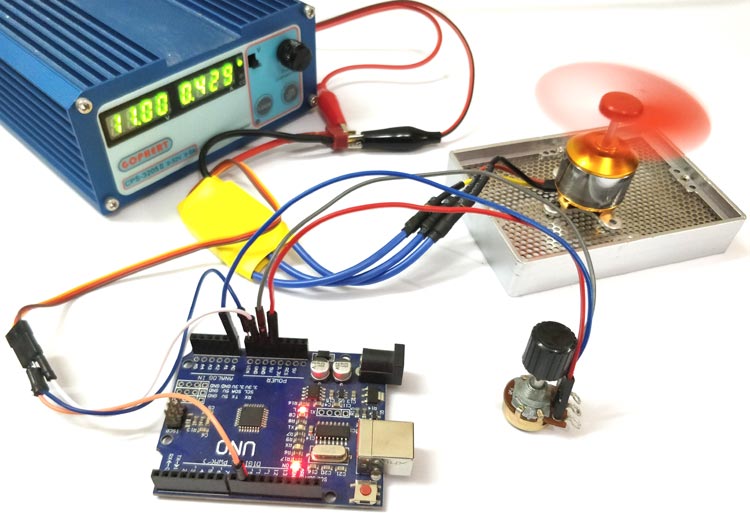
روٹر پوزیشن سینسرز کے بغیر موٹرز ان صورتوں میں لاگو ہوتی ہیں جہاں موٹر شافٹ لوڈ کے بغیر شروع ہوتی ہے (پنکھا، پروپیلر وغیرہ)۔ اگر شروع کرنا بوجھ کے تحت کیا جاتا ہے تو، روٹر پوزیشن سینسر والی موٹر کی ضرورت ہوتی ہے۔ دونوں اختیارات کے اپنے فوائد اور نقصانات ہیں۔
سینسر والا حل زیادہ آسان کنٹرول میں بدل جاتا ہے، لیکن اگر کم از کم ایک سینسر ناکام ہوجاتا ہے، تو انجن کو الگ کرنا پڑے گا، اس کے علاوہ، سینسر کو الگ تاروں کی ضرورت ہوتی ہے۔ سینسر لیس ورژن میں، کسی خاص تار کی ضرورت نہیں ہے، لیکن سٹارٹ اپ کے دوران روٹر آگے پیچھے جھولے گا۔ اگر یہ ناقابل قبول ہے، تو سسٹم میں سینسر لگانا ضروری ہے۔
روٹر اور اسٹیٹر، مراحل کی تعداد
BLDC موٹر کا روٹر بالترتیب بیرونی یا اندرونی اور سٹیٹر اندرونی یا بیرونی ہو سکتا ہے۔ سٹیٹر مقناطیسی طور پر کنڈکٹیو مواد سے بنا ہوتا ہے، دانتوں کی تعداد کو مراحل کی تعداد سے مکمل طور پر تقسیم کیا جاتا ہے۔ روٹر ضروری نہیں کہ مقناطیسی طور پر چلنے والے مواد سے بنایا جائے، لیکن ضروری طور پر اس کے ساتھ مضبوطی سے جڑے ہوئے میگنےٹ کے ساتھ۔

میگنےٹ جتنے مضبوط ہوں گے، دستیاب ٹارک اتنا ہی زیادہ ہوگا۔ اسٹیٹر دانتوں کی تعداد روٹر میگنےٹ کی تعداد کے برابر نہیں ہونی چاہیے۔دانتوں کی کم از کم تعداد کنٹرول کے مراحل کی تعداد کے برابر ہے۔
زیادہ تر جدید برش لیس ڈی سی موٹرز تین فیز ہیں، صرف ڈیزائن اور کنٹرول کی سادگی کے لیے۔ جیسا کہ AC انڈکشن موٹرز میں ہوتا ہے، یہاں تین مرحلوں کی وائنڈنگ سٹیٹر سے "ڈیلٹا" یا "سٹار" کے ذریعے جڑی ہوتی ہیں۔
روٹر پوزیشن کے سینسرز کے بغیر ایسی موٹروں میں 3 پاور وائر ہوتے ہیں، اور سینسرز والی موٹروں میں 8 تاریں ہوتی ہیں: دو اضافی تاریں سینسرز کو پاور کرنے کے لیے اور تین سینسر کے سگنل آؤٹ پٹ کے لیے۔
کم رفتار بیرونی روٹر موٹرز فی فیز بڑی تعداد میں کھمبوں (اور اس وجہ سے دانت) کے ساتھ بنائی جاتی ہیں تاکہ کنٹرول کرنٹ کی فریکوئنسی سے نمایاں طور پر کم زاویہ فریکوئنسی کے ساتھ گردش حاصل کی جا سکے۔ لیکن تیز رفتار تھری فیز موٹرز کے ساتھ بھی، 9 سے کم دانتوں کی تعداد عام طور پر استعمال نہیں ہوتی۔