ایک غیر مطابقت پذیر موٹر کی فریکوئینسی ریگولیشن
فی الحال، غیر مطابقت پذیر موٹر کے ساتھ الیکٹرک ڈرائیو کی گردش کی کونیی رفتار کا فریکوئنسی کنٹرول بڑے پیمانے پر استعمال کیا جاتا ہے، کیونکہ یہ ایک وسیع رینج میں روٹر کی گردش کی رفتار کو برائے نام قدر کے اوپر اور نیچے دونوں جگہ آسانی سے تبدیل کرنے کی اجازت دیتا ہے۔
فریکوئینسی کنورٹرز جدید، ہائی ٹیک ڈیوائسز ہیں جن میں ایک وسیع ایڈجسٹمنٹ رینج ہے جس میں غیر مطابقت پذیر موٹرز کو کنٹرول کرنے کے لیے کاموں کا ایک وسیع سیٹ ہے۔ اعلیٰ ترین معیار اور وشوسنییتا انہیں مختلف صنعتوں میں پمپوں، پنکھوں، کنویئرز وغیرہ کی ڈرائیوز کو کنٹرول کرنے کے لیے استعمال کرنا ممکن بناتی ہے۔

سپلائی وولٹیج کے لیے فریکوئنسی کنورٹرز کو سنگل فیز اور تھری فیز میں تقسیم کیا گیا ہے، لیکن ڈیزائن کے لحاظ سے، گھومنے والی اور جامد برقی مشینوں میں۔ الیکٹرک مشین کنورٹرز میں، متغیر فریکوئنسی روایتی یا خصوصی برقی مشینوں کا استعمال کرکے حاصل کی جاتی ہے۔ وی جامد تعدد کنورٹرز سپلائی کرنٹ کی فریکوئنسی میں تبدیلی برقی عناصر کے استعمال سے حاصل کی جاتی ہے جن کی کوئی حرکت نہیں ہوتی۔
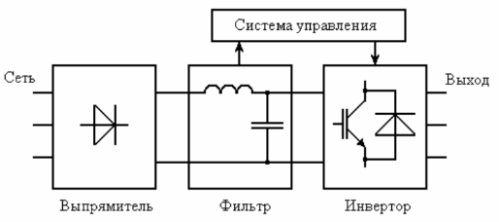
انڈکشن موٹر کا فریکوینسی کنورٹر سرکٹ
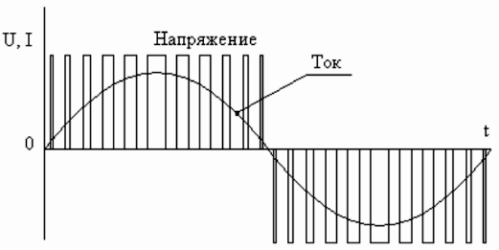
فریکوئنسی کنورٹر کا آؤٹ پٹ سگنل
سنگل فیز مینز کے لیے فریکوئنسی کنورٹرز 7.5 کلو واٹ تک کی طاقت کے ساتھ پروڈکشن آلات کے لیے الیکٹرک ڈرائیو فراہم کر سکتے ہیں۔ جدید سنگل فیز کنورٹرز کے ڈیزائن کی ایک خصوصیت یہ ہے کہ ان پٹ پر 220V کے وولٹیج کے ساتھ ایک فیز ہوتا ہے، اور آؤٹ پٹ پر ایک ہی وولٹیج ویلیو کے ساتھ تین فیز ہوتے ہیں، جو تھری فیز الیکٹرک موٹرز کو ایک سے منسلک کرنے کی اجازت دیتا ہے۔ کیپسیٹرز استعمال کیے بغیر ڈیوائس۔
380V تھری فیز نیٹ ورک سے چلنے والے فریکوئینسی کنورٹرز 0.75 سے 630 کلو واٹ تک پاور رینج میں دستیاب ہیں۔ طاقت کی قیمت پر منحصر ہے، آلات پولیمر مشترکہ اور دھاتی کیسوں میں تیار کیے جاتے ہیں.
انڈکشن موٹرز کے لیے سب سے مقبول کنٹرول حکمت عملی ویکٹر کنٹرول ہے۔ فی الحال، زیادہ تر فریکوئنسی کنورٹرز ویکٹر کنٹرول یا یہاں تک کہ بغیر سینسر ویکٹر کنٹرول کو نافذ کرتے ہیں (یہ رجحان فریکوئنسی کنورٹرز میں پایا جاتا ہے جو اصل میں اسکیلر کنٹرول کو نافذ کرتے ہیں اور اسپیڈ سینسر کو جوڑنے کے لیے ٹرمینلز نہیں رکھتے ہیں)۔
آؤٹ پٹ لوڈ کی قسم پر منحصر ہے، تعدد کنورٹرز کو نفاذ کی قسم کے مطابق ذیلی تقسیم کیا جاتا ہے:
-
پمپ اور فین ڈرائیوز کے لیے؛
-
عام صنعتی برقی پروپلشن کے لیے؛
-
اوورلوڈ کے ساتھ چلنے والی الیکٹرک موٹرز کے حصے کے طور پر کام کرتا ہے۔

عام بوجھ کی مکینیکل خصوصیات
جدید فریکوئنسی کنورٹرز میں فنکشنل خصوصیات کا متنوع سیٹ ہوتا ہے، مثال کے طور پر، ان کے پاس موٹر کی گردش کی رفتار اور سمت کا دستی اور خودکار کنٹرول ہوتا ہے۔ بلٹ میں پوٹینومیٹر کنٹرول پینل پر۔0 سے 800 ہرٹز تک آؤٹ پٹ فریکوئنسی رینج کو ایڈجسٹ کرنے کی صلاحیت کے ساتھ تحفہ۔
کنورٹرز پیریفرل سینسرز کے سگنلز کے مطابق ایک غیر مطابقت پذیر موٹر کو خود بخود کنٹرول کرنے کے قابل ہوتے ہیں اور دیے گئے ٹائمنگ الگورتھم کے مطابق الیکٹرک ڈرائیو چلاتے ہیں۔ قلیل مدتی بجلی کی ناکامی کی صورت میں خودکار وصولی کے افعال کی حمایت کریں۔ ریموٹ کنسول سے عارضی کنٹرول انجام دیں اور الیکٹرک موٹروں کو اوورلوڈ سے بچائیں۔

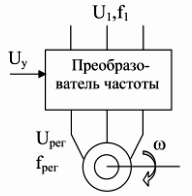
گردش کی کونیی رفتار اور سپلائی کرنٹ کی فریکوئنسی کے درمیان تعلق Eq سے ہوتا ہے۔
ωo = 2πe1/ p
مسلسل سپلائی وولٹیج U1 اور تعدد میں تبدیلی کے ساتھ، انڈکشن موٹر کا مقناطیسی بہاؤ بدل جاتا ہے۔ ایک ہی وقت میں، مقناطیسی نظام کے بہتر استعمال کے لیے، بجلی کی فراہمی کی فریکوئنسی میں کمی کے ساتھ، یہ ضروری ہے کہ وولٹیج کو متناسب طور پر کم کیا جائے، بصورت دیگر اسٹیل میں مقناطیسی کرنٹ اور نقصانات نمایاں طور پر بڑھ جائیں گے۔
اسی طرح، جیسے جیسے سپلائی فریکوئنسی بڑھتی ہے، مقناطیسی بہاؤ کو مستقل رکھنے کے لیے وولٹیج کو متناسب طور پر بڑھنا چاہیے، کیونکہ بصورت دیگر (مسلسل شافٹ ٹارک کے ساتھ) اس سے روٹر کرنٹ بڑھے گا، کرنٹ کے ذریعے اس کے وائنڈنگز کو اوورلوڈنگ کرے گا اور زیادہ سے زیادہ ٹارک کو کم کرے گا۔
عقلی وولٹیج ریگولیشن کا قانون مزاحمتی لمحے کی نوعیت پر منحصر ہے۔
جامد بوجھ (Ms = const) کے ایک مستقل لمحے پر، وولٹیج کو اس کی فریکوئنسی U1/f1 = const کے تناسب سے ریگولیٹ کیا جانا چاہیے۔ پنکھے کے بوجھ کی نوعیت کے لیے، تناسب U1/f21 = const کی شکل لیتا ہے۔
لوڈ ٹارک کے ساتھ الٹا متناسب رفتار U1 /√f1 = const۔
ذیل کے اعداد و شمار کونیی رفتار کے فریکوئنسی کنٹرول کے ساتھ ایک انڈکشن موٹر کی ایک آسان کنکشن ڈایاگرام اور مکینیکل خصوصیات دکھاتے ہیں۔
فریکوئنسی کنورٹر کا ایک غیر مطابقت پذیر موٹر سے کنکشن کا خاکہ
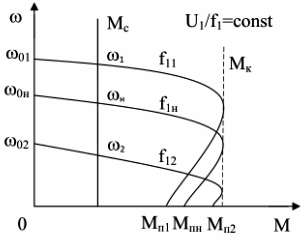
مزاحمت کے مستقل جامد لمحے کے ساتھ بوجھ کے لیے خصوصیات
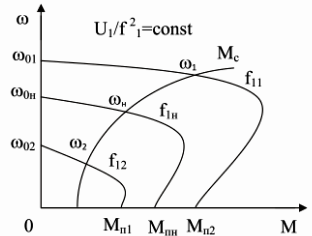
پنکھے کو چارج کرنے کے لیے این ایس فیچرز
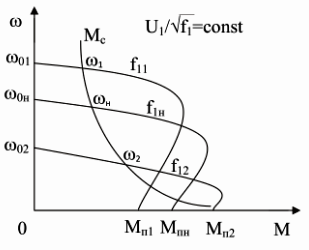
جامد لوڈ ٹارک کے تحت خصوصیات گردش کی کونیی رفتار کے الٹا متناسب
ایک غیر متزلزل موٹر کی رفتار کا تعدد ریگولیشن آپ کو رینج میں گردش کی کونیی رفتار کو تبدیل کرنے کی اجازت دیتا ہے — 20 … 30 سے 1۔ ایک غیر مطابقت پذیر موٹر کی رفتار کا ضابطہ مرکزی سے نیچے کی طرف عملاً صفر تک کیا جاتا ہے۔
جب سپلائی نیٹ ورک کی فریکوئنسی تبدیل ہوتی ہے تو، ایک غیر مطابقت پذیر موٹر کی گردشی رفتار کی اوپری حد اس کی میکانکی خصوصیات پر منحصر ہوتی ہے، خاص طور پر چونکہ برائے نام غیر مطابقت پذیر موٹر سے اوپر کی فریکوئنسیوں پر کم تعدد کی نسبت بہتر توانائی کی خصوصیات کے ساتھ کام کرتی ہے۔ اس لیے، اگر ڈرائیو سسٹم میں گیئر باکس استعمال کیا جاتا ہے، تو موٹر کا یہ فریکوئنسی کنٹرول نہ صرف نیچے، بلکہ برائے نام نقطہ سے اوپر تک، مکینیکل طاقت کی شرائط کے تحت گردش کی زیادہ سے زیادہ جائز رفتار تک ہونا چاہیے۔ روٹر
جب انجن کی رفتار اس کے پاسپورٹ میں بتائی گئی قدر سے بڑھ جاتی ہے، تو پاور سورس کی فریکوئنسی برائے نام سے 1.5 - 2 گنا سے زیادہ نہیں ہونی چاہیے۔
فریکوئنسی کا طریقہ گلہری-کیج روٹر انڈکشن موٹر کے ریگولیشن کے لیے سب سے زیادہ امید افزا ہے۔ اس طرح کے ضابطے کے ساتھ بجلی کے نقصانات کم ہیں، کیونکہ ان میں اضافہ نہیں ہوتا ہے۔ پھسلنا… نتیجے میں میکانی خصوصیات انتہائی سخت ہیں۔