آری ملز کے لیے بجلی کا سامان
 آرا ملوں میں، گول لکڑی کو تختوں، شہتیروں اور دیگر اقسام میں کاٹنے کا بنیادی سامان آرا ملوں کا بنیادی سامان ہے۔
آرا ملوں میں، گول لکڑی کو تختوں، شہتیروں اور دیگر اقسام میں کاٹنے کا بنیادی سامان آرا ملوں کا بنیادی سامان ہے۔
آرے کا فریم ایک ملٹی آر مشین ہے جس میں آری ایک سخت فریم میں پھیلی ہوئی ہے۔ عمودی آری ملز سنگل اور ڈبل ڈیک، تنگ اور چوڑے سوراخوں میں، جاگنگ اور مسلسل فیڈ کے ساتھ تیار کی جاتی ہیں۔ جدید ترین آری مل فریموں میں تین سے چھ کے درمیان الیکٹرک موٹریں ہیں۔ کرینک شافٹ گردش کی رفتار — 200 سے 600 منٹ – 1 تک، ڈرائیو کو ایک غیر مطابقت پذیر موٹر کے ذریعے زخم روٹر کے ذریعے، اور کبھی کبھی گلہری پنجرے کی روٹر موٹر کے ذریعے چلایا جاتا ہے۔
آری کے فریم پر (تصویر 1)، 3.2-9 میٹر کی لمبائی اور 65 سینٹی میٹر قطر کے نوشتہ جات کو پیشانی کی کٹائی میں کاٹا جاتا ہے۔ فریم کا کاسٹ آئرن فریم دو ٹانگوں اور اطراف کی دیواروں پر مشتمل ہوتا ہے جو ایک دوسرے سے ٹرانسورس کنکشن کے ذریعے جڑے ہوتے ہیں۔
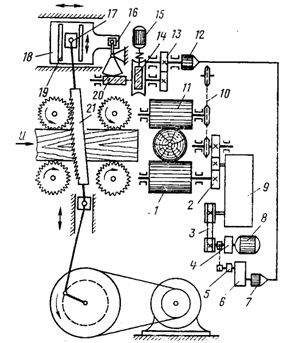
چاول۔ 1. آری مل فریم کا کینیمیٹک ڈایاگرام
آری مل کا فریم بیس پلیٹ پر نصب ہے۔ ایک کرینک شافٹ جس میں دو فلائی وہیلز اور ایک ڈرائیو پللی ایک پلیٹ پر نصب دو اہم بیرنگ میں گھومتی ہے۔I-beam کی کنیکٹنگ راڈ نچلے سر کے ساتھ ایک رولر بیئرنگ کے ذریعے کرینک شافٹ پن سے جڑی ہوتی ہے، اور اوپری سر سوئی کے بیرنگ کے ذریعے آرا فریم کے نچلے کراس ممبر کے ذریعے پن سے جڑا ہوتا ہے۔
آری فریم کے نچلے اور اوپری کراس ممبران گول ٹیوبلر سپورٹ کے ذریعے جڑے ہوئے ہیں۔ آری فریم کے کراس ممبروں پر پنوں کے ساتھ ٹیکسٹولائٹ سلائیڈر ٹاپرڈ رولر بیرنگ کے ذریعہ جڑے ہوئے ہیں۔
آری فریم کا ڈیزائن ہائیڈرولک ٹینشنر کے استعمال کی اجازت دیتا ہے۔ اس کے آٹھ گائیڈز میں سے چار پرزمیٹک اور چار فلیٹ ہیں، جو بستر پر نصب کاسٹ آئرن پلیٹوں سے جوڑے میں جڑے ہوئے ہیں۔ اوپری گائیڈ پلیٹیں سلائیڈ پر لگائی جاتی ہیں اور پلاٹ Δ کے سائز کے لحاظ سے آری فریم کے جھکاؤ کے طریقہ کار کے ذریعے منتقل ہوتی ہیں۔
فور رولر فیڈ میکانزم کی انفرادی ڈرائیو، جس میں تھائیرسٹر ڈرائیو شامل ہوتی ہے، لاگ فیڈ کی رفتار کی ہموار ایڈجسٹمنٹ کو یقینی بناتی ہے۔ ٹارک انجن 8 سے الیکٹرو میگنیٹ، برقی مقناطیسی کلچ 4، بیلٹ ٹرانسمیشن 3، گیئر باکس 9 اور گیئرز 2 کے ذریعے نچلے رولرز 1 میں منتقل ہوتا ہے۔ اوپری رولرز 11 رولر چین 10 کے ذریعے گھومتے ہیں۔
پارسل کے سائز کو الیکٹرو میگنیٹک کلچ 4 کی سلائیڈ کو تبدیل کرکے ایڈجسٹ کیا جاتا ہے، جو سینٹرفیوگل ریگولیٹر 5 کے ڈائل کو موڑ کر انجام دیا جاتا ہے۔ اس مقصد کے لیے، آپریٹر سروو موٹر 15 کو آن کرتا ہے، ڈائل کو مناسب زاویہ پر موڑتا ہے، گردش ورم گیئر 14، گیئرز 13، سیلسن سینسر 12، سیلسن ریسیور 7 اور ریڈوسر 6 کے ذریعے کی جاتی ہے۔ورم گیئر 20 اور لیور 16 کے ذریعے کمرے Δ کو بیک وقت تبدیل کرنے سے، پلیٹ 18 آری فریم کی اوپری سلائیڈ 17 کی گائیڈ 19 کے ساتھ افقی جہاز میں حرکت کرتی ہے اور آرا 21 کے جھکاؤ میں تبدیلی آتی ہے۔
آری مل فریم 2P80 کا اسکیمیٹک سرکٹ ڈایاگرام تصویر میں دکھایا گیا ہے۔ 2. اس کا برقی سامان 125 کلو واٹ مین شافٹ ڈرائیو اسینکرونس موٹر M1، آرا فریم ٹیلٹنگ میکانزم ڈرائیو M2 موٹر، ہائیڈرولک اسٹیشن موٹر MZ، چکنا پمپ موٹر M4 اور خودکار کنٹرول سسٹم پر مشتمل ہے، جس کی بنیاد ایک DC موٹر M5 کے ساتھ ایک thyristor ڈرائیو پر ہے۔
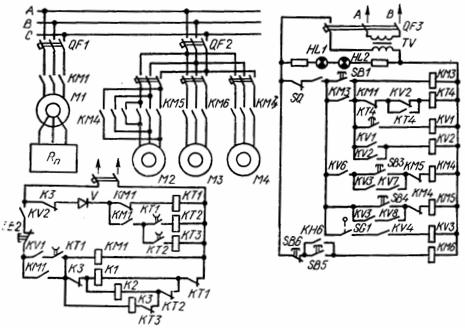
چاول۔ 2. آری مل فریم 2P80 کا الیکٹریکل اسکیمیٹک ڈایاگرام
موٹروں کا زیادہ سے زیادہ موجودہ تحفظ خودکار سوئچز کے ذریعے فراہم کیا جاتا ہے: QF1 — موٹر M1, QF2 — موٹرز M2, MZ, M4 اور QF3 — کنٹرول سرکٹس۔ QF3 آن ہونے پر، وارننگ لیمپ HL1 اور HL2 روشن ہو جاتے ہیں۔ مین شافٹ موٹر M1 لکیری کونٹیکٹر KM1 کا استعمال کرتے ہوئے شروع کی گئی ہے، اور فیڈ موٹر M5 کی ڈرائیو موٹر کو contactor KM2 کا استعمال کرتے ہوئے شروع کیا گیا ہے۔
الیکٹریکل کنٹرول سرکٹ میں شامل ہیں: پاور سرکٹس (ڈرائیونگ موٹرز)؛ ریلے-کنٹریکٹر کنٹرول سرکٹس اور خودکار کنٹرول سسٹم کے سرکٹس thyristor DC ڈرائیو پر مبنی ہیں۔ اوپری گیٹ کھلنے پر آرا فریم ڈرائیو کے آغاز کو آن کرنے کے لیے، مین شافٹ اور وی بیلٹ کی حفاظتی پٹیوں کو ہٹا دیا جاتا ہے، اور جب آرے کے فریم کو روک دیا جاتا ہے، تو حد کے سوئچ استعمال کیے جاتے ہیں (جس کا بلاک تصویر 2 میں دکھایا گیا ہے۔ حروف SQ کے ساتھ)۔
زخم والے روٹر کے ساتھ موٹر M1 کا آغاز ترتیب وار ایکسلریشن ریلے KT1، KT2 اور KT3 کو بند کر کے وقت کے ایک فنکشن کے طور پر کیا جاتا ہے، جو ایک مقررہ وقت میں تاخیر کے ساتھ بتدریج شروع ہونے والے ریوسٹیٹ Rp کے تین مراحل کو کنیکٹیکٹر K1، K2 کا استعمال کرتے ہوئے نکالتا ہے۔ اور K3.
اسٹارٹ بٹن SB1 (تصویر 2 دیکھیں) کو دبانے سے کنٹیکٹر KM3 کی کوائل آن ہو جاتی ہے، جو آئل پمپ کی موٹر M4 کے پاور کنیکٹس KM3 کو بند کر دیتی ہے، بند ہونے والا رابطہ KM3 بٹن SB1 کو نظرانداز کر دیتا ہے۔
مین موشن موٹر M1 اس وقت شروع ہوتی ہے جب انٹرمیڈیٹ ریلے KV1 کا رابطہ KV1 بند ہو جاتا ہے۔ اس ریلے کی کنڈلی KT4 ٹائم ریلے کے KT4 رابطے کے ذریعے طاقت حاصل کرتی ہے، جو بند ہونے پر تاخیر کے ساتھ بند ہو جائے گی۔ لہذا، ریلے KT4 موٹر M4 اور M1 کے آغاز کے درمیان تاخیر فراہم کرتا ہے۔
جب ریلے KV1 کو آن کیا جاتا ہے، ریلے KV2 بیک وقت آن ہوجاتا ہے، جس کا بند ہونے والا رابطہ KV2 کنٹیکٹر KM1 کے کوائل کو متحرک کرتا ہے۔ کوائل KM1، پاور حاصل کرنے کے بعد، موٹر M1 کے پاور سرکٹ کے KM1 کے اہم رابطوں کو آن کر دیتی ہے، اور موٹر کا روٹر اس وقت گھومنا شروع کر دے گا جب ابتدائی ریوسٹیٹ مکمل طور پر سیٹ ہو جائے گا۔ ایکسلریشن کونٹیکٹر K1، K2 اور K3 سست روی کے ساتھ کام کرنے کے بعد، موٹر روٹر زیادہ سے زیادہ رفتار سے گھومے گا۔
جب موٹر M1 کا آغاز مکمل ہو جائے گا، افتتاحی رابطہ K3 بیک وقت رابطہ کار K1 اور K2 کے سپلائی سرکٹ کو توڑ دے گا، اور فیڈر M5 کے موٹر سٹارٹر سرکٹ میں رابطہ K3 بند کر کے اسے شروع کرنے کے لیے تیار کر دے گا۔ SB2 بٹن دبانے سے موٹر بند ہو جاتی ہے۔
ہائیڈرولک نظام سامنے اور عقبی دروازوں کو اونچا اور نیچے کرنے کی سہولت فراہم کرتا ہے، ویلڈڈ کیسنگز پر جن کے اوپری فیڈ رولر لگے ہوتے ہیں۔ہائیڈرولک سٹیشن کے ذریعے چلنے والے ہائیڈرولک سلنڈروں کے ذریعے گیٹس کو اوپری پوزیشن میں اٹھایا جاتا ہے۔ ہائیڈرولک سٹیشن کی ڈرائیو موٹر M3 کے ذریعے فراہم کی جاتی ہے، جو ایک بٹن کے زور پر شروع ہوتی ہے، جبکہ سٹارٹر کے کوائل KM6 کو توانائی بخشی جاتی ہے، جو KM6 کے اہم رابطوں کو بند کر دیتی ہے۔
آری فریم کے جھکاؤ کو دستی طور پر (بٹن SB3 اور SB4 دبانے سے) یا خود بخود کنٹرول کیا جا سکتا ہے۔ اسٹارٹر KM4 ("زیادہ") کے وائنڈنگ KM4 اور اسٹارٹر KM5 ("کم") کے KM5 کے خودکار کنٹرول کے ساتھ، وہ ریلے KV3 کے ذریعے پاور حاصل کرتے ہیں، جو موڈ سوئچ کے "خودکار" پوزیشن میں ہونے پر آن ہو جاتا ہے۔ ، یہ تب ہوتا ہے جب رابطہ SQ1 بند ہوتا ہے۔
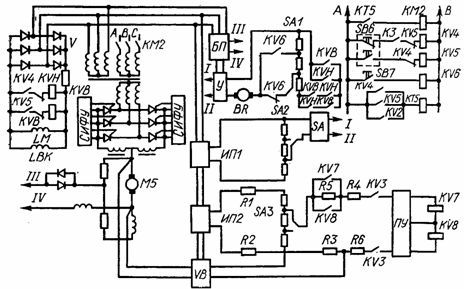
thyristor پاور سپلائی M5 DC موٹر اور ایک thyristor کنورٹر پر مشتمل ہے۔ thyristor کنورٹر (تصویر 9.2, c) اسٹارٹر KM2 کے ذریعے، رابطہ KV3 کے ذریعے آن کیا جاتا ہے، جس کی کنڈلی اس وقت پاور حاصل کرتی ہے جب ٹائم ریلے KT5، جو اس کے سرکٹ میں ہے، کا رابطہ بند ہوجاتا ہے۔ ٹائمنگ ریلے KT5 کو اس وقت تقویت ملے گی جب کوائل KV4 (فارورڈ موشن) یا KV5 (ریورس موشن) کو متحرک کیا جائے گا۔
اگر لاگ کاٹنے کے دوران پھنس جائے تو انجن کو الٹ کر اسے پیچھے ہٹا لیا جاتا ہے۔ فیڈر موٹر کو شروع کرنا M1 موٹر کے چلائے بغیر ممکن نہیں ہے۔ یہ سپلائی سرکٹ KV4 میں رابطہ K3 کی شمولیت سے یقینی بنایا جاتا ہے، جو موٹر M1 شروع ہونے کے بعد بند ہو جاتا ہے۔ جب سٹارٹر KM2 کو آن کیا جاتا ہے، تو موٹر کا کنورٹر اور فیلڈ وائنڈنگ LM متحرک ہو جاتے ہیں۔
اگر رجسٹر پھنس گیا ہے تو، SB6 بٹن دبانے سے ریلے KV4 اور KVB بند ہو جاتے ہیں اور KV5 اور KVH آن ہو جاتے ہیں۔اس صورت میں، KVH ریلے ایمپلیفائر U کے سپلائی سرکٹ میں اپنے رابطوں کو بند کر دیتا ہے، جو تھائیرسٹر کنورٹر میں شامل ہوتا ہے، نتیجے کے طور پر، کنورٹر کے آؤٹ پٹ پر وولٹیج کی قطبیت بدل جاتی ہے اور موٹر کی سمت بدل جاتی ہے۔ گردش

گھومنے والی رفتار کا استحکام جب بوجھ میں تبدیلی ایک منفی تاثرات کے ذریعے یقینی بنائی جاتی ہے، جسے BR tachogenerator کے ذریعے LBL ایکزیٹیشن کوائل کے ساتھ لاگو کیا جاتا ہے۔ آرمیچر BR ایمپلیفائر V کے ان پٹ سے جڑا ہوا ہے۔ عارضی کو تھائرسٹر کنورٹر سرکٹ میں دوبارہ تخلیقی بریک کے استعمال سے مجبور کیا جاتا ہے۔
فیڈ کی شرح دستی طور پر اور خود بخود ایڈجسٹ کی جاتی ہے۔ اس کے لیے SA سوئچ سیٹ کیا گیا ہے۔ دستی فیڈ ریٹ ریگولیشن میں، ریٹ ریگولیٹر ایمپلیفائر U سے سرکٹس I اور II کے ذریعے منسلک ہوتا ہے۔ سپیڈ کنٹرولرز SA1 - SA3 ان پینلز کے سوئچز ہیں جن سے MLT ریزسٹرس جڑے ہوئے ہیں۔
حرکت پذیر رابطہ SA1 کو منتقل کرنے سے کنٹرول سگنل تبدیل ہوتا ہے جو PU ایمپلیفائر کے ذریعے پلس فیز کنٹرول سسٹم (SPPC) میں داخل ہوتا ہے، جو ایک برج ریکٹیفائر سرکٹ کے ذریعے جڑے ہوئے تھائرسٹرس کے فائرنگ اینگل کو تبدیل کرتا ہے، جس کی وجہ سے موٹر M5 کی رفتار بدل جاتی ہے۔
SA سوئچ کے ذریعے M5 انجن کی رفتار کو خود بخود ایڈجسٹ کرنے کے لیے، SA1 ایمپلیفائر بلاک Y سے منقطع ہو جاتا ہے اور یمپلیفائر Y SA2 — جرنل ڈائی میٹر سینسر سے منسلک ہوتا ہے۔ اس صورت میں، SA1 SA2 سے بجلی حاصل کرنا شروع کرتا ہے، جو کہ ایک پوٹینشیومیٹر ہے جو اسٹیبلائزنگ پاور سپلائی IP1 سے منسلک ہوتا ہے اور پاور سوئچنگ میکانزم کے ذریعے گھمایا جاتا ہے۔
جب جرنل کا قطر تبدیل ہوتا ہے، پوٹینشیومیٹر SA2 کا سلائیڈر حرکت کرتا ہے اور SA1 پر لاگو کنٹرول وولٹیج کی قدر بدل جاتی ہے، اس لیے فیڈ کی شرح جرنل کے قطر میں تبدیلی کے ساتھ بدل جاتی ہے۔ رفتار کی قیمت آری فریم کی ڈھلوان سے مماثل ہونی چاہئے، رفتار SA3 کو سوئچ کرکے کنٹرول کی جاتی ہے۔
آری فریم ٹیلٹ سینسر SA3 ریزسٹرس R1 اور R2 کے ذریعے ایک مستحکم پاور سپلائی IP2 سے منسلک ہے۔ نتیجہ آری فریم کے جھکاؤ کے زاویہ کے متناسب تناؤ ہے۔ اس وولٹیج کا موازنہ موٹر وولٹیج M5 کے ساتھ کیا جاتا ہے، رفتار کے متناسب، موٹر آرمچر سے لیا جاتا ہے اور ریکٹیفائر بلاک VB کے ذریعے ریزسٹر R3 کو کھلایا جاتا ہے، اسے آری فریم کے ٹیلٹ سینسر کے آؤٹ پٹ وولٹیج سے منہا کیا جاتا ہے۔
ریورس میں موٹر کے ساتھ، VB بلاک ایک مستقل حوالہ قطبیت کو برقرار رکھتا ہے۔ مماثل سگنل انٹرمیڈیٹ ایمپلیفائر PU کے ان پٹ کو ریزسٹرس R4 — R6 اور بند ہونے والے رابطے KV3 (خودکار ایڈجسٹمنٹ کے دوران بند) کے ذریعے دیا جاتا ہے۔ سگنل کو بڑھایا جاتا ہے اور PU آؤٹ پٹ کو کھلایا جاتا ہے، جس سے ریلے KV7 اور KV8 منسلک ہوتے ہیں۔ وہ ایرر ان پٹ سگنل کی قطبیت پر منحصر ہوتے ہیں۔
لہذا، جیسے جیسے فیڈ کی شرح بڑھتی ہے، موٹر سے ہٹا دیا گیا وولٹیج بڑھ جاتا ہے اور مماثل قدر منفی ہوتی ہے۔ اس صورت میں، فیڈ کی شرح اور آری فریم کے جھکاؤ کے درمیان تعلق ٹوٹ گیا ہے. PU ایمپلیفائر سے ایمپلیفائیڈ آؤٹ پٹ سگنل میں ریلے KV7 شامل ہے، جس کے بند ہونے والے رابطوں میں کوائل KM4 شامل ہے۔
KM4 بند ہونے والے رابطے M2 موٹر کو "آگے" موڑ دیتے ہیں - آری فریم کے جھکاؤ کو بڑھاتے ہیں۔ایک ہی وقت میں، SA3 پر آؤٹ پٹ وولٹیج پوٹینومیٹر سلائیڈر کو حرکت دے کر بڑھایا جاتا ہے۔ انحراف کا اشارہ صفر تک کم ہونا شروع ہو جاتا ہے، جس کے بعد آری فریم کے جھکاؤ میں اضافہ رک جاتا ہے۔ یہ فیڈ کی شرح اور آری فریم کے زاویہ کے درمیان میچ کو برقرار رکھتا ہے۔
کنٹرول کا عمل فیڈ کی شرح میں کمی کے ساتھ اسی طرح آگے بڑھتا ہے، لیکن اس معاملے میں غلطی کا اشارہ ایک مثبت علامت ہے۔ اس کی وجہ سے ریلے KV8 آن ہو جاتا ہے، نیز KM5 اور موٹر M2 کو الٹ جاتا ہے۔ جیسے جیسے فیڈ کی شرح کم ہوتی ہے، آری فریم کی ڈھلوان بھی کم ہوتی جاتی ہے۔ ریگولیشن کے دوران، ڈرائیو کے رابطے KV7 اور KV8 مزاحمتی R5 کو نظرانداز کرتے ہیں، جو اس عمل کو زبردستی ممکن بناتا ہے۔
کاٹنے کے آغاز میں، یہ ضروری ہے کہ کاٹنے کی رفتار کام کرنے والی فیڈ کی رفتار کے 30٪ سے زیادہ نہ ہو۔ یہ مندرجہ ذیل طریقے سے کیا جاتا ہے۔ بٹن SB7 کو دبانے سے، ریلے KV6 کو متحرک کیا جاتا ہے، جس کے رابطے آؤٹ پٹ SA1 میں تبدیل ہو جاتے ہیں، تاکہ ایک چھوٹا سا کنٹرول وولٹیج بند ہونے والے رابطہ KV6 کے ذریعے تھائیرسٹر کنورٹر کے ان پٹ کو فراہم کیا جائے، جو کم کاٹنے کی رفتار پیدا کرتا ہے۔ .
فیڈ ختم ہونے کے بعد، SB7 بٹن آف ہو جاتا ہے اور ڈیوائس ورکنگ موڈ میں چلی جاتی ہے۔ فیڈ کے دوران آری فریم کے جھکاؤ کے لیے خودکار کنٹرول سسٹم کی رکاوٹ بند ہونے والے رابطہ KV6 کو سپلائی سرکٹ سے منسلک کر کے فراہم کی جاتی ہے۔ اسٹارٹر کنڈلی KM4 اور KM5 کا۔