غیر مطابقت پذیر موٹروں کی ساختی شکلیں۔
 بیرونی ساختی شکلیں۔ غیر مطابقت پذیر موٹرز انجن کو نصب کرنے کے طریقے اور ماحول کے اثرات سے اس کے تحفظ کی شکل سے طے کیا جاتا ہے۔ عام ٹانگ موٹر کی کارکردگی وسیع ہے (تصویر 1، اے)۔ اس صورت میں، موٹر شافٹ افقی ہونا ضروری ہے. فلینج والے انجن (تصویر 1، ب) افقی اور عمودی تنصیبات کے لیے بڑے پیمانے پر استعمال ہوتے ہیں۔
بیرونی ساختی شکلیں۔ غیر مطابقت پذیر موٹرز انجن کو نصب کرنے کے طریقے اور ماحول کے اثرات سے اس کے تحفظ کی شکل سے طے کیا جاتا ہے۔ عام ٹانگ موٹر کی کارکردگی وسیع ہے (تصویر 1، اے)۔ اس صورت میں، موٹر شافٹ افقی ہونا ضروری ہے. فلینج والے انجن (تصویر 1، ب) افقی اور عمودی تنصیبات کے لیے بڑے پیمانے پر استعمال ہوتے ہیں۔
وہ ان لائن انڈکشن موٹرز بھی تیار کرتے ہیں جن کا کوئی فریم، اینڈ شیلڈز، شافٹ نہیں ہوتا ہے۔ اس طرح کی موٹر کے عناصر مشین کے جسم کے حصوں میں سرایت کر جاتے ہیں، اور موٹر شافٹ مشین کے شافٹوں میں سے ایک ہے (اکثر تکلا)، اور بستر مشین اسمبلی کا جسم ہے، مثال کے طور پر، ایک پیسنے والا سر (تصویر 1) 2)۔
خاص ڈیزائن والی موٹریں بیرون ملک وسیع پیمانے پر تقسیم کی جاتی ہیں، جن میں چھوٹی ریڈیل ڈائمینشنز اور کافی لمبائی والی موٹریں، اور ڈسک موٹرز، خاص طور پر سلنڈر کے سائز کے سٹیٹر اور انگوٹھی کے سائز کے بیرونی روٹر کے ساتھ۔ موٹرز بھی استعمال کی جاتی ہیں، جب وہ آن ہوتے ہیں، تو روٹر، جس کی شکل ایک مخروطی ہوتی ہے، محوری سمت میں حرکت کرتی ہے، جس سے ایک اہم تھرسٹ فورس تیار ہوتی ہے۔
اس قوت کو موٹر کے مینز سے منقطع ہونے کے بعد موٹر شافٹ پر کام کرنے والے مکینیکل بریک کو چھوڑنے کے لیے استعمال کیا جاتا ہے۔ اس کے علاوہ، متعدد انجن ڈیزائن منسلک گیئر باکسز، گیئر باکسز اور مکینیکل ویریٹرز کے ساتھ استعمال کیے جاتے ہیں جو ہموار ریگولیشن فراہم کرتے ہیں۔
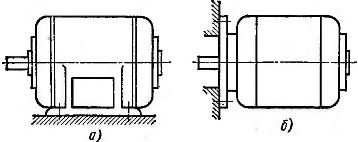
چاول۔ 1. غیر مطابقت پذیر موٹروں کا ڈیزائن
انجنوں کو خصوصی ڈیزائن کی شکلوں کے ساتھ استعمال کرنے کا نقصان کسی حادثے کی صورت میں ان کو تبدیل کرنے میں دشواری ہے۔ ایک خراب الیکٹرک موٹر کو تبدیل نہیں کیا جانا چاہئے، لیکن مرمت کی جائے، اور مرمت کے دوران مشین سست ہو جائے.
مختلف قسم کے ماحولیاتی تحفظ والے انجن مشینوں کو چلانے کے لیے استعمال کیے جاتے ہیں۔
ڈھال والی موٹروں میں گرلز ہوتی ہیں جو آخری شیلڈز پر وینٹوں کو ڈھانپتی ہیں۔ یہ غیر ملکی اشیاء کو انجن میں داخل ہونے سے روکتا ہے اور کارکن کو گھومنے اور زندہ حصوں کو چھونے سے بھی روکتا ہے۔ مائع کی بوندوں کو اوپر سے گرنے سے روکنے کے لیے، انجن نیچے کی طرف یا عمودی وینٹوں سے لیس ہیں۔
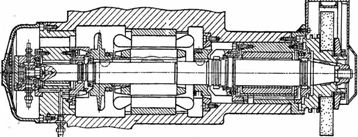
چاول۔ 2. بلٹ ان پیسنے والی موٹر
تاہم، جب ایسی الیکٹرک موٹر ورکشاپ میں کام کرتی ہے، تو اس کا پنکھا ہوا کے ساتھ مل کر دھول کو چوستا ہے، کولنٹ یا تیل کا چھڑکاؤ کرتا ہے، ساتھ ہی اسٹیل یا کاسٹ آئرن کے چھوٹے ذرات، جو سمیٹنے کی موصلیت پر قائم رہتے ہیں اور ہلتے ہیں۔ متبادل مقناطیسی میدان کے زیر اثر، فوری طور پر موصلیت ختم ہو جاتی ہے۔
بند انجن، جن کی آخری اسکرینوں میں وینٹیلیشن سوراخ نہیں ہوتے ہیں، ماحولیاتی اثرات کے خلاف زیادہ قابل اعتماد تحفظ رکھتے ہیں۔ کمزور ٹھنڈک کی وجہ سے اس طرح کے انجن، محفوظ شدہ جہتوں کے ساتھ، کم طاقت رکھتے ہیں۔اسی طاقت اور رفتار کے ساتھ، بند الیکٹرک موٹر محفوظ سے 1.5-2 گنا بھاری ہے اور اس کے مطابق، اس کی قیمت زیادہ ہے۔
بند موٹروں کے سائز اور لاگت کو کم کرنے کی خواہش نے بند اڑا دینے والی الیکٹرک موٹرز کی تخلیق کا باعث بنی۔ اس طرح کی الیکٹرک موٹر میں ایک بیرونی پنکھا ہوتا ہے جو موٹر شافٹ کے آخر میں ڈرائیو اینڈ کے مخالف ہوتا ہے اور اسے ٹوپی سے ڈھانپا جاتا ہے۔ یہ پنکھا موٹر ہاؤسنگ کے ارد گرد اڑتا ہے۔
پنکھے والی موٹریں بند موٹرز سے نمایاں طور پر ہلکی اور سستی ہیں۔ اڑا ہوا موٹریں اکثر دھاتی کاٹنے والی مشینوں کو چلانے کے لیے استعمال ہوتی ہیں۔ ماحولیاتی تحفظ کی دوسری شکلوں والے انجن دھاتی کاٹنے والی مشینوں کو چلانے کے لیے نسبتاً کم ہی استعمال ہوتے ہیں۔ خاص طور پر، منسلک الیکٹرک موٹرز بعض اوقات پیسنے والی مشینوں کو چلانے کے لیے استعمال کی جاتی ہیں۔
الیکٹرک موٹرز کو 127، 220 اور 380 V کے معیاری وولٹیج کے لیے ڈیزائن کیا گیا ہے۔ ایک ہی موٹر کو مختلف وولٹیج والے نیٹ ورکس سے جوڑا جا سکتا ہے، مثال کے طور پر، 127 اور 220 V، 220 اور 380 V کے وولٹیج والے نیٹ ورکس کے ساتھ۔ الیکٹرک موٹر کی سٹیٹر وائنڈنگ ایک مثلث میں جڑی ہوئی ہے، بڑے کے لیے - ایک ستارے میں۔ اس شمولیت کے ساتھ الیکٹرک موٹر کے وائنڈنگز میں کرنٹ اور ان میں وولٹیج دونوں صورتوں میں یکساں ہوگا۔ اس کے علاوہ، وہ الیکٹرک موٹرز 500 V پیدا کرتے ہیں، ان کے سٹیٹرز مستقل طور پر ایک ستارے میں جڑے ہوتے ہیں۔
بہت سی صنعتوں میں استعمال ہونے والی غیر مطابقت پذیر گلہری-کیج موٹرز 0.6-100 کلو واٹ فی ریٹیڈ پاور کے ساتھ تیار کی جاتی ہیں۔ ہم وقت ساز رفتار 600، 750، 1000، 1500 اور 3000 rpm۔
الیکٹرک موٹر کی سمیٹنے والی تاروں کا کراس سیکشن اس میں سے بہنے والے کرنٹ کی شدت پر منحصر ہے۔ ایک بڑے کرنٹ کے ساتھ، موٹر وائنڈنگ کا حجم زیادہ ہوگا۔مقناطیسی سرکٹ کا کراس سیکشن مقناطیسی بہاؤ کی شدت کے متناسب ہے۔ اس طرح، الیکٹرک موٹر کے طول و عرض کا تعین کرنٹ اور مقناطیسی بہاؤ کی حسابی قدروں یا الیکٹرک موٹر کے ریٹیڈ ٹارک سے کیا جاتا ہے۔ شرح شدہ انجن کی طاقت

جہاں P.n — برائے نام طاقت، kW، Mn- برائے نام لمحہ، N • m، nn- برائے نام رفتار، rpm۔
اسی انجن کے سائز کے لیے ریٹیڈ پاور بڑھ جاتی ہے کیونکہ اس کی ریٹیڈ رفتار بڑھ جاتی ہے۔ لہذا، کم رفتار برقی موٹریں اسی طاقت کی تیز رفتار موٹروں سے بڑی ہوتی ہیں۔
چھوٹے سوراخوں کو پیستے وقت، کافی حد تک کاٹنے کی رفتار حاصل کرنے کے لیے بہت زیادہ پیسنے والی سپنڈل کی رفتار کی ضرورت ہوتی ہے۔ لہٰذا، جب 3 ملی میٹر قطر والے پہیے کو صرف 30 میٹر فی سیکنڈ کی رفتار سے پیستے ہیں، تو اسپنڈل کی رفتار 200،000 انقلابات فی منٹ کے برابر ہونی چاہیے۔ تیز سپنڈل کی رفتار پر، کلیمپنگ فورس کو تیزی سے کم کیا جا سکتا ہے۔ ایک ہی وقت میں، وہیل پیسنے اور مینڈریل موڑنے کو کم کیا جاتا ہے، اور سطح کی تکمیل اور مشینی درستگی میں اضافہ ہوتا ہے.
مندرجہ بالا کے سلسلے میں، صنعت نام نہاد کے متعدد ماڈل استعمال کرتا ہے. 12,000-144,000 rpm اور اس سے زیادہ کی گردش کی رفتار کے ساتھ الیکٹرک اسپنڈلز۔ الیکٹرو اسپنڈل (تصویر 3، اے) رولنگ بیرنگ پر پیسنے والی اسپنڈل ہے جس میں بلٹ ان ہائی فریکوئنسی گلہری-کیج موٹر ہے۔ موٹر روٹر پیسنے والے پہیے کے مخالف سپنڈل کے آخر میں دو بیرنگ کے درمیان واقع ہے۔
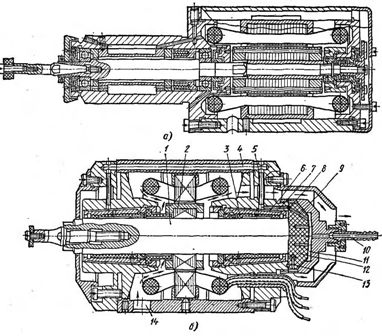
چاول۔ 3. الیکٹرو اسپنڈلز
الیکٹرک اسپنڈل سٹیٹر کو شیٹ الیکٹریکل سٹیل سے اسمبل کیا جاتا ہے۔ اس پر ایک دو قطبی کنڈلی رکھی گئی ہے۔30,000-50,000 rpm تک کی رفتار والے موٹر روٹر کو بھی شیٹ میٹل سے ڈائل کیا جاتا ہے اور اسے روایتی شارٹ سرکٹ وائنڈنگ کے ساتھ فراہم کیا جاتا ہے۔ وہ روٹر کے قطر کو ہر ممکن حد تک کم کرتے ہیں۔
الیکٹرو اسپنڈلز کے آپریشن کے لیے بیئرنگ کی قسم کا انتخاب خاص اہمیت کا حامل ہے۔ صحت سے متعلق بال بیرنگ عام طور پر استعمال ہوتے ہیں، جو کیلیبریٹڈ اسپرنگس کا استعمال کرتے ہوئے بنائے گئے پری لوڈ کے ساتھ کام کرتے ہیں۔ اس طرح کے بیرنگ گردش کی رفتار کے لیے استعمال کیے جاتے ہیں جو فی منٹ 100,000 انقلابات سے زیادہ نہیں ہوتے ہیں۔
Aerostatic بیرنگ صنعت میں بڑے پیمانے پر استعمال ہوتے ہیں (تصویر 3، b)۔ ہائی فریکوئینسی الیکٹرک موٹر کا شافٹ 1 ہوا سے چکنا ہوا بیرنگ 3 میں گھومتا ہے۔ محوری بوجھ شافٹ کے سرے اور سپورٹ بیئرنگ 12 کے درمیان ہوا کے کشن کے ذریعے جذب ہوتا ہے، جس کے خلاف انجن کو ٹھنڈا کرنے کے لیے ہول 14 کے ذریعے ہاؤسنگ کے اندرونی حصے میں فراہم کی جانے والی ہوا کے دباؤ کے تحت شافٹ کو دبایا جاتا ہے۔ کمپریسڈ ہوا فلٹر سے گزر کر چیمبر 11 میں فٹنگ 10 کے ذریعے داخل ہوتی ہے۔ یہاں سے، چینل 9 اور سرکلر نالی 8 سے، ہوا چینل 7 اور چیمبر 6 میں جاتی ہے۔ وہاں سے، ہوا بیئرنگ میں داخل ہوتی ہے۔ خلا انجن ہاؤسنگ میں پائپ 5 اور چینلز 4 کے ذریعے بائیں بیئرنگ کو ہوا فراہم کی جاتی ہے۔
ایگزاسٹ ہوا کو چینلز 13 کے ذریعے خارج کیا جاتا ہے۔ سپورٹ بیئرنگ گیپ میں ہوا کا کشن غیر محفوظ کاربن گریفائٹ سے بنے بیئرنگ کے ذریعے چیمبر 11 سے گزرنے والی ہوا سے پیدا ہوتا ہے۔ ہر بیئرنگ میں ٹاپراڈ پیتل ہے۔ اس میں ایک کاربن گریفائٹ لائنر دبایا جاتا ہے، جس کے سوراخ کانسی سے بھرے ہوتے ہیں۔ الیکٹرو اسپنڈل کو شروع کرنے سے پہلے، ہوا فراہم کی جاتی ہے اور اسپنڈل اور بشنگ کے درمیان ایئر کشن بنائے جاتے ہیں۔ یہ آغاز کے دوران بیرنگ پر رگڑ اور پہننے کو ختم کرتا ہے۔اس کے بعد، موٹر کو آن کر دیا جاتا ہے، روٹر 2 کی رفتار 5-10 سیکنڈ میں برائے نام رفتار تک پہنچ جاتی ہے۔ جب انجن بند ہو جاتا ہے تو، روٹر 2 3-4 منٹ تک چلتا ہے۔ اس وقت کو کم کرنے کے لیے الیکٹرک بریک کا استعمال کیا جاتا ہے۔
ایئر بیگز کا استعمال برقی سپنڈل میں رگڑ کے نقصانات کو کافی حد تک کم کرتا ہے، ہوا کی کھپت 6-25 m3/h ہے۔
مائع چکنا کرنے والے بیرنگ پر الیکٹرو اسپنڈلز بھی استعمال کیے گئے ہیں۔ ان کے آپریشن کے لیے ہائی پریشر میں تیل کی مسلسل گردش کی ضرورت ہوتی ہے، ورنہ بیرنگ کا گرم ہونا ناقابل قبول ہو جاتا ہے۔
اعلی تعدد والی الیکٹرک موٹروں کی تیاری کے لیے انفرادی حصوں کی درست تیاری، روٹر کا متحرک توازن، عین مطابق اسمبلی اور سٹیٹر اور روٹر کے درمیان فرق کی سخت یکسانیت کو یقینی بنانے کی ضرورت ہوتی ہے۔ اعلی تعدد الیکٹرک موٹر کو فراہم کرنے والے کرنٹ کی فریکوئنسی برقی موٹر کی مطلوبہ رفتار کے لحاظ سے منتخب کی جاتی ہے:

جہاں n اگر الیکٹرک موٹر کی گردش کی مطابقت پذیر تعدد، rpm، f کرنٹ کی فریکوئنسی ہے، Hz، p قطبوں کی تعداد ہے، چونکہ p = 1، پھر

12,000 اور 120,000 rpm کے برقی سپنڈلز کی ہم وقت ساز گردش کی رفتار پر، موجودہ فریکوئنسی بالترتیب 200 اور 2000 Hz کے برابر ہونی چاہیے۔
ہائی فریکوئنسی موٹرز کو پاور کرنے کے لیے خصوصی جنریٹرز استعمال کیے جاتے ہیں۔ انجیر میں۔ 4 تین فیز سنکرونس انڈکشن جنریٹر دکھاتا ہے۔ جنریٹر سٹیٹر میں چوڑے اور تنگ سلاٹ ہوتے ہیں۔ فیلڈ کنڈلی، جو سٹیٹر کے وسیع سلاٹ میں واقع ہے، براہ راست کرنٹ کے ساتھ فراہم کی جاتی ہے۔ اس کوائل کے کنڈکٹرز کا مقناطیسی میدان اسٹیٹر دانتوں اور روٹر پروٹریشنز کے ذریعے بند ہوتا ہے جیسا کہ تصویر میں دکھایا گیا ہے۔ 4 نقطے والی لکیر کے ساتھ۔
جب روٹر گھومتا ہے تو، روٹر پروٹریشنز کے ساتھ حرکت کرنے والا مقناطیسی میدان اسٹیٹر کے تنگ سلاٹوں میں واقع الٹرنیٹنگ کرنٹ وائنڈنگ کے موڑ کو عبور کرتا ہے اور ایک متبادل ای کو آمادہ کرتا ہے۔ وغیرہ c. اس e کی تعدد وغیرہ v. روٹر کانوں کی رفتار اور تعداد پر منحصر ہے۔ فیلڈ واؤنڈ ونڈنگز میں ایک ہی بہاؤ سے پیدا ہونے والی الیکٹرو موٹیو قوتیں کنڈلیوں کے آنے والے ایکٹیویشن کی وجہ سے ایک دوسرے کو منسوخ کر دیتی ہیں۔ فیلڈ کنڈلی مینز سے منسلک ایک ریکٹیفائر کے ذریعہ چلتی ہے۔ اسٹیٹر اور روٹر میں شیٹ الیکٹریکل اسٹیل سے بنے مقناطیسی کور ہوتے ہیں۔
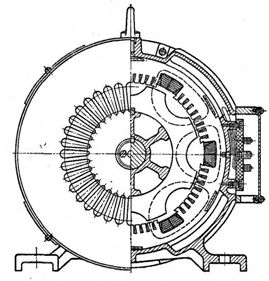
چاول۔ 4. ہائی فریکوئنسی انڈکشن جنریٹر
بیان کردہ ڈیزائن والے جنریٹرز 1 سے 3 کلو واٹ تک برائے نام پاور اور 300 سے 2400 ہرٹز تک فریکوئنسی کے لیے تیار کیے جاتے ہیں۔ جنریٹر 3000 rpm کی ہم وقت ساز رفتار کے ساتھ غیر مطابقت پذیر موٹرز سے چلتے ہیں۔
بڑھتی ہوئی فریکوئنسی والے انڈکشن جنریٹرز کو سیمی کنڈکٹر (تھائریسٹر) کنورٹرز سے تبدیل کرنا شروع ہو گیا ہے۔ اس صورت میں، وہ عام طور پر کرنٹ کی فریکوئنسی کو تبدیل کرنے کی صلاحیت فراہم کرتے ہیں اور اس وجہ سے برقی موٹر کی گردش کی رفتار کو ایڈجسٹ کرنے کی صلاحیت فراہم کرتے ہیں۔ اگر اس طرح کے ضابطے کے دوران وولٹیج کو مستقل رکھا جاتا ہے، تو مسلسل پاور ریگولیشن کی جاتی ہے۔ اگر کرنٹ کی فریکوئنسی اور وولٹیج کا تناسب (اور اس وجہ سے موٹر کے مقناطیسی بہاؤ) کو مستقل رکھا جاتا ہے، تو ریگولیشن کو ایک لمبے عرصے تک جائز ٹارک کے لیے ہر رفتار پر ایک مستقل کے ساتھ کیا جاتا ہے۔
thyristor فریکوئنسی کنورٹر اور غیر مطابقت پذیر گلہری کیج موٹر والی ڈرائیوز کے فوائد اعلی کارکردگی اور استعمال میں آسانی ہیں۔ منفی پہلو اب بھی اعلی قیمت ہے۔مکینیکل انجینئرنگ میں، ہائی فریکوئنسی موٹرز کے لیے ایسی ڈرائیو استعمال کرنے کی سب سے زیادہ سفارش کی جاتی ہے۔ ہمارے ملک میں اس قسم کی تجرباتی ڈرائیوز بنائی گئی ہیں۔
کم طاقت والی دو فیز غیر مطابقت پذیر موٹرز اکثر مشین ٹول ایگزیکٹو ڈرائیوز میں استعمال ہوتی ہیں۔ ایسی موٹر کے سٹیٹر کے دو وائنڈنگ ہوتے ہیں: فیلڈ وائنڈنگ 1 اور کنٹرول وائنڈنگ 2 (تصویر 5، اے)۔ گلہری کے پنجرے میں روٹر 4 ایک بڑی فعال مزاحمت رکھتا ہے۔ کنڈلیوں کا محور ایک دوسرے پر کھڑا ہے۔
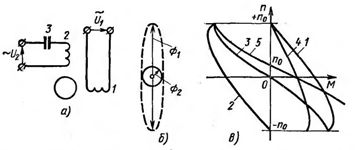
چاول۔ 5. دو فیز انڈکشن موٹر کی اسکیم اور اس کی خصوصیات
وولٹیجز Ul اور U2 وائنڈنگز پر لاگو ہوتے ہیں۔ جب کیپسیٹر 3 کوائل 2 کے سرکٹ سے منسلک کیا جاتا ہے، تو اس میں موجود کرنٹ کوائل 1 میں موجود کرنٹ سے زیادہ ہو جاتا ہے۔ اس صورت میں، ایک گھومتا ہوا بیضوی مقناطیسی میدان بنتا ہے اور گلہری کا روٹر 4 گھومنا شروع کر دیتا ہے۔ اگر آپ وولٹیج U2 کو کم کرتے ہیں تو کوائل 2 میں کرنٹ بھی کم ہو جائے گا۔ یہ گھومنے والے مقناطیسی میدان کے بیضوی شکل میں تبدیلی کا باعث بنے گا، جو زیادہ سے زیادہ لمبا ہوتا جاتا ہے (تصویر 5، بی)۔
بیضوی فیلڈ موٹر کو ایک شافٹ پر دو موٹرز کے طور پر سمجھا جا سکتا ہے، ایک پلسیٹنگ فیلڈ F1 کے ساتھ کام کرتی ہے اور دوسری سرکلر فیلڈ F2 کے ساتھ۔ F1 پلسیٹنگ فیلڈ موٹر کو دو ایک جیسی سرکلر فیلڈ انڈکشن موٹرز کے طور پر سوچا جا سکتا ہے جو مخالف سمتوں میں گھومنے کے لیے وائرڈ ہیں۔
انجیر میں۔ 5، c ایک سرکلر گھومنے والے فیلڈ کے ساتھ انڈکشن موٹر کی مکینیکل خصوصیات 1 اور 2 اور مختلف سمتوں میں گھومنے پر روٹر کی ایک اہم فعال مزاحمت کو ظاہر کرتا ہے۔ سنگل فیز موٹر کی مکینیکل خصوصیت 3 کو n کی ہر قدر کے لیے خصوصیات 1 اور 2 کے لمحات M کو گھٹا کر بنایا جا سکتا ہے۔n کی کسی بھی قدر پر، اعلی روٹر مزاحمت کے ساتھ سنگل فیز موٹر کا ٹارک روک دیا جاتا ہے۔ سرکلر فیلڈ موٹر کی مکینیکل خصوصیت وکر 4 سے ظاہر ہوتی ہے۔
دو فیز موٹر کی مکینیکل خصوصیت 5 کو n کی کسی بھی قدر پر خصوصیات 3 اور 4 کے لمحات M کو گھٹا کر بنایا جا سکتا ہے۔ n0 کی قدر مثالی بیکار رفتار پر دو فیز انڈکشن موٹر کی گردشی رفتار ہے۔ کوائل 2 (تصویر 5، اے) کے سپلائی کرنٹ کو ایڈجسٹ کرنے سے، خصوصیت 4 (تصویر 5، سی) کی ڈھلوان کو تبدیل کرنا ممکن ہے، اور اس وجہ سے n0 کی قدر۔ اس طرح، دو فیز انڈکشن موٹر کا سپیڈ کنٹرول کیا جاتا ہے۔
جب اعلی پرچی اقدار کے ساتھ کام کرتے ہیں تو، روٹر میں نقصانات کافی اہم ہو جاتے ہیں. اس وجہ سے، سمجھے جانے والے ضابطے کو صرف کم طاقت والی معاون ڈرائیوز کے لیے استعمال کیا جاتا ہے۔ سرعت اور سست رفتاری کے وقت کو کم کرنے کے لیے، ہولو روٹر والی دو فیز انڈکشن موٹرز استعمال کی جاتی ہیں۔ ایسے انجن میں، روٹر ایک پتلی دیواروں والا ایلومینیم کا کھوکھلا سلنڈر ہوتا ہے۔