لیتھز کی الیکٹرک ڈرائیو
 لیتھز پر منافع بخش کاٹنے کی رفتار حاصل کرنے کے لیے، آپ کو 80: 1 سے 100: 1 کی حد میں تغیرات کی ضرورت ہے۔ اس صورت میں، یہ ضروری ہے کہ تبدیلی ہر ممکن حد تک ہموار ہو تاکہ کاٹنے کی رفتار کو یقینی بنایا جا سکے۔ مقدمات
لیتھز پر منافع بخش کاٹنے کی رفتار حاصل کرنے کے لیے، آپ کو 80: 1 سے 100: 1 کی حد میں تغیرات کی ضرورت ہے۔ اس صورت میں، یہ ضروری ہے کہ تبدیلی ہر ممکن حد تک ہموار ہو تاکہ کاٹنے کی رفتار کو یقینی بنایا جا سکے۔ مقدمات
کنٹرول رینج کو زیادہ سے زیادہ زاویہ رفتار (یا گردش کی فریکوئنسی) کا کم سے کم تناسب کہا جاتا ہے، اور ٹرانسلیشنل موشن والی مشینوں کے لیے، زیادہ سے زیادہ اور کم از کم لکیری رفتار کا تناسب۔
لیتھ گروپ کے لیے جس میں مرکزی حرکت روٹری ہوتی ہے، اسے عام طور پر زیادہ تر رفتار کی حد پر طاقت کی مستقل ضرورت ہوتی ہے، اور صرف کم رفتار کی حد میں — لمحے کی مستقل مزاجی زیادہ سے زیادہ قابل اجازت کے برابر ہوتی ہے جو مرکزی طاقت کی حالت کی نقل و حرکت کے طریقہ کار کے مطابق ہوتی ہے۔ کم گھومنے کی رفتار مخصوص قسم کی پروسیسنگ کے لیے ہے: تراشنا، ویلڈڈ سیون کو موڑنا، وغیرہ۔
لیتھ ڈیوائس:
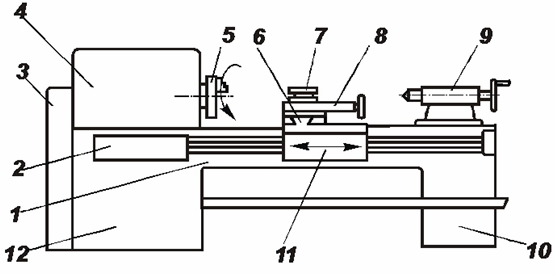 لیتھ کی اہم اکائیاں: 1 - بستر؛ 2 - پاور سپلائی باکس؛ 3 - گٹار بدلنے کے قابل گیئرز کے ساتھ؛ 4 - گیئر باکس اور تکلا کے ساتھ کھدائی کرنے والا؛ 5-جبڑے خود کو مرکز کرنے والا چک؛ 6 - طول بلد حمایت؛ 7 - اوزار کے لیے ہولڈر؛ 8 - ٹرانسورس کیریج؛ 9 - دم؛ 10 - پیچھے پیڈسٹل؛ 11 - تہبند؛ 12 — فرنٹ پیڈسٹل نوڈس اور اسکرو کٹنگ لیتھ کے میکانزم:
لیتھ کی اہم اکائیاں: 1 - بستر؛ 2 - پاور سپلائی باکس؛ 3 - گٹار بدلنے کے قابل گیئرز کے ساتھ؛ 4 - گیئر باکس اور تکلا کے ساتھ کھدائی کرنے والا؛ 5-جبڑے خود کو مرکز کرنے والا چک؛ 6 - طول بلد حمایت؛ 7 - اوزار کے لیے ہولڈر؛ 8 - ٹرانسورس کیریج؛ 9 - دم؛ 10 - پیچھے پیڈسٹل؛ 11 - تہبند؛ 12 — فرنٹ پیڈسٹل نوڈس اور اسکرو کٹنگ لیتھ کے میکانزم:
لیتھز اور ڈرلنگ مشینوں پر V مین ڈرائیوز وسیع پیمانے پر ایپلی کیشنز، چھوٹے اور درمیانے درجے کے لیے، ڈرائیو کی اہم قسم ایک انڈکشن گلہری-کیج موٹر ہے۔
غیر مطابقت پذیر انجن ساختی طور پر اچھی طرح سے مشین کے گیئر باکس کے ساتھ مل کر، آپریشن میں قابل اعتماد اور خصوصی دیکھ بھال کی ضرورت نہیں ہے.
اسپنڈل کی مستقل رفتار والی لیتھز پر، مشینی قطر ڈریو میں تبدیلی کے ساتھ، کاٹنے کی رفتار بدل جائے گی، m/min: vz = π x drev x nsp / 1000 لہذا، مشین کی سپنڈل کی رفتار کا تعین دو عوامل سے کیا جاتا ہے — قطر do6p اور کاٹنے کی رفتار vz. جب تکنیکی عوامل میں تبدیلی آتی ہے تو مشین کے عقلی استعمال کے لیے سپنڈل کی رفتار میں تبدیلی کی ضرورت ہوتی ہے۔

کاٹنے والے آلے اور مشین کے مکمل استعمال کے لیے، مصنوعات کی پروسیسنگ نام نہاد اقتصادی طور پر قابل عمل (زیادہ سے زیادہ) کاٹنے کی رفتار سے کی جانی چاہیے، جو، جب مشین مناسب فیڈ اور کٹ کی گہرائی کے ساتھ چلتی ہے، کم سے کم یونٹ مشینی لاگت پر مطلوبہ درستگی اور سطح کی صفائی کے ساتھ ورک پیس کی پروسیسنگ کو یقینی بنانا چاہئے، پیداواری ممکنہ حد سے قدرے کم ہوگی۔

چھوٹی لیتھز پر، سپنڈل کی گردش کی سمت کو شروع کرنا، روکنا اور الٹنا اکثر رگڑ کے کلچ کا استعمال کرتے ہوئے کیا جاتا ہے۔ موٹر مینز سے جڑی رہتی ہے اور ایک سمت میں گھومتی ہے۔
کچھ لیتھز کی مین ڈرائیو کے لیے ملٹی اسپیڈ اسینکرونس موٹرز استعمال کی جاتی ہیں۔ ایسی ڈرائیو کے استعمال کی سفارش کی جاتی ہے اگر اس کے نتیجے میں گیئر باکس کو آسان بنایا جائے یا جب فلائی پر سپنڈل کی رفتار کو تبدیل کرنا ضروری ہو۔ …
 ہیوی ڈیوٹی کے لیے لیتھز اور عمودی لیتھز میں عام طور پر ڈی سی موٹر کا استعمال کرتے ہوئے مین ڈرائیو کا الیکٹرو مکینیکل سٹیپلیس اسپیڈ کنٹرول ہوتا ہے۔
ہیوی ڈیوٹی کے لیے لیتھز اور عمودی لیتھز میں عام طور پر ڈی سی موٹر کا استعمال کرتے ہوئے مین ڈرائیو کا الیکٹرو مکینیکل سٹیپلیس اسپیڈ کنٹرول ہوتا ہے۔
اس طرح کی مشینوں کا نسبتاً آسان گیئر باکس دو سے تین مراحل کونیی رفتار فراہم کرتا ہے، اور دو قدموں کے درمیان وقفہ میں یہ رینج (3 - 5) میں کیا جاتا ہے: 1 موٹر کی کونیی رفتار کی مقناطیسی تبدیلی کرکے ہموار ایڈجسٹمنٹ بہاؤ کی رفتار. یہ، خاص طور پر، اختتام اور مخروطی سطحوں کو موڑتے وقت مسلسل کاٹنے کی رفتار کو برقرار رکھنا ممکن بناتا ہے۔
ضابطے کی نرمی کا تعین دو ملحقہ کنٹرول حصوں میں رفتار کے تناسب سے کیا جاتا ہے۔کنٹرول کی ہمواری مشین کی کارکردگی کو نمایاں طور پر متاثر کرتی ہے، کیونکہ زیادہ سے زیادہ کاٹنے کی رفتار کا انحصار ورک پیس کے مواد کی سختی، مواد کی خصوصیات اور کاٹنے والے آلے کی جیومیٹری کے ساتھ ساتھ اس کی نوعیت پر ہوتا ہے۔ پروسیسنگ مختلف سائز کے پرزے، مختلف مواد اور مختلف ٹولز کو ایک ہی مشین پر پروسیس کیا جا سکتا ہے، جو کاٹنے کے حالات کو تبدیل کرنے کی وجہ ہے۔
الیکٹرک ڈرائیو ٹرننگ اور ڈرلنگ مشینوں کی خصوصیت میں شروع ہونے کے آغاز پر رگڑ قوتوں کا ایک بڑا لمحہ ہوتا ہے (0.8 Mnom تک) اور چہرے کی پلیٹ کی جڑتا کا ایک اہم لمحہ ہوتا ہے جس کا ایک حصہ روٹر کی جڑتا کے لمحے سے زیادہ ہوتا ہے۔ الیکٹرک موٹر 8 سے 9 گنا زیادہ مکینیکل رفتار پر۔ اس معاملے میں ڈی سی ڈرائیو کا استعمال مستقل سرعت کے ساتھ ایک ہموار آغاز فراہم کرتا ہے۔
مشین بنانے والے پلانٹس کی دکانوں میں، عام طور پر کوئی براہ راست کرنٹ نیٹ ورک نہیں ہوتا ہے، اس لیے بھاری دھاتوں کو کاٹنے والی مشینوں کے انجنوں کو پاور کرنے کے لیے الگ کنورٹرز نصب کیے جاتے ہیں: الیکٹرک مشینیں (G -D سسٹم) یا سٹیٹک (TP -D سسٹم) )۔
ایک پیچیدہ ڈیوٹی سائیکل والی مشینوں کے آٹومیشن میں سٹیپلیس الیکٹریکل سپیڈ کنٹرول (دو زون) کا استعمال کیا جاتا ہے، جو انہیں کسی بھی کٹنگ اسپیڈ (مثال کے طور پر لیتھز کے لیے کچھ خودکار لیتھز) کے ساتھ ایڈجسٹ کرنا آسان بناتا ہے۔

چھوٹے اور درمیانے درجے کی لیتھوں کو کھانا کھلانے کا ایک آلہ اکثر مین انجن کے ذریعہ کیا جاتا ہے، جو تھریڈنگ کا امکان فراہم کرتا ہے۔ فیڈ کی شرح کو ایڈجسٹ کرنے کے لیے، ملٹی اسٹیج فیڈ بکس استعمال کیے جاتے ہیں۔ گیئرز کو دستی طور پر یا برقی مقناطیسی رگڑ کلچز (دور سے) استعمال کرتے ہوئے منتقل کیا جاتا ہے۔
کچھ جدید لیتھز اور بورنگ مشینیں فیڈر کے لیے وسیع کنٹرول کے ساتھ علیحدہ ڈی سی ڈرائیو استعمال کرتی ہیں۔ موٹر کی کونیی رفتار (100 - 200): 1 یا اس سے زیادہ کی حد میں مختلف ہوتی ہے۔ ڈرائیو EMU — D, PMU — D یا TP — D سسٹم کے مطابق چلائی جاتی ہے۔
لیتھز (کیریج کی تیز رفتار حرکت، پروڈکٹ کلیمپ، کولنٹ پمپ وغیرہ) کے لیے معاون ڈرائیوز کے لیے الگ الگ غیر مطابقت پذیر گلہری-کیج موٹرز استعمال کی جاتی ہیں۔
پر جدید لیتھز، ٹرننگ لیتھز اور روٹری مشینیں بڑے پیمانے پر معاون حرکات کو خودکار کرنے کے ساتھ ساتھ ریموٹ کنٹرول مشین میکانزم کے لیے استعمال ہوتی ہیں۔
سکرو کاٹنے والی لیتھ 1K62 کی الیکٹرک ڈرائیو
سپنڈل کی ڈرائیو اور سپورٹ کی ورکنگ پاور سپلائی 10 کلو واٹ کی طاقت کے ساتھ ایک غیر مطابقت پذیر گلہری کیج موٹر کے ذریعے کی جاتی ہے۔ کیلیپر کی طول بلد اور ٹرانسورس فیڈز۔ - متعلقہ ہینڈلز کا استعمال کرتے ہوئے گیئر باکس کے گیئرز کو بھی شفٹ کرنا۔
ایک علیحدہ 1.0 کلو واٹ کی غیر مطابقت پذیر موٹر تیز رفتار حرکت کے لیے استعمال کی جاتی ہے۔ مشین کے سپنڈل کو آن اور آف کرنے کے ساتھ ساتھ اس کا الٹنا بھی ملٹی لیئر رگڑ کلچ کا استعمال کرتے ہوئے کیا جاتا ہے، جسے دو ہینڈلز سے کنٹرول کیا جاتا ہے۔ہر سمت میں کیلیپر کی مکینیکل فیڈ ایک ہی ہینڈل کے ساتھ لگی ہوئی ہے۔
برج لیتھ برقی ڈرائیو 1P365 کے ساتھ
لیتھز کو موڑنے کی ایک خصوصیت مشین کو روکے بغیر خودکار رفتار سوئچنگ اور اسپنڈل فیڈ ہے، جو گیئر باکس اور فیڈ باکس میں بنائے گئے برقی مقناطیسی کپلنگز کی مدد سے انجام دی جاتی ہے۔
لیتھ لیتھ 1P365 کی سپنڈل ڈرائیو 14 کلو واٹ کی طاقت کے ساتھ ایک غیر مطابقت پذیر موٹر کے ذریعے کی جاتی ہے، دوسری موٹر 1.7 کلو واٹ کی طاقت کے ساتھ ہائیڈرولک سسٹم کے پمپ کو چلاتی ہے اور دو مشینوں کی تیز رفتار طول بلد حرکت کو حاصل کرنے کے لیے بھی استعمال ہوتی ہے۔ حمایت کرتا ہے. مشین میں 0.125 کلو واٹ کی طاقت کے ساتھ کولنگ پمپ بھی ہے۔
سپنڈل کی کونیی رفتار 3.4 سے 150 rad/s تک کے مراحل میں ایڈجسٹ ہوتی ہے۔ گیئر باکس میں گیئر یونٹوں کی نقل و حرکت ہائیڈرولک سلنڈروں کے ذریعہ کی جاتی ہے۔ گیئر باکس میں ایک کلچ بھی ہوتا ہے جس میں دو کلچ ہوتے ہیں: ایک سپنڈل کے آگے (دائیں) گردش کو متحرک کرنے کے لیے اور دوسرا الٹا (بائیں) گردش کو متحرک کرنے کے لیے۔ ان کلچوں کو چالو کرنے کا عمل ایک ہائیڈرولک سلنڈر کے ذریعے کیا جاتا ہے، جس کی گھرنی کو اس کے مطابق برقی مقناطیس کی مدد سے ترجمہ کیا جاتا ہے۔ کپلنگز اسپنڈل موٹر شافٹ کو گیئر باکس سے جوڑتے ہیں۔
سپنڈل کو تیزی سے روکنے کے لیے گیئر باکس میں ایک ہائیڈرولک بریک فراہم کی جاتی ہے، جسے برقی مقناطیس کی مدد سے ایک خاص ہائیڈرولک سپول کے ذریعے کنٹرول کیا جاتا ہے۔
سپر مین ڈرائیو سے چلتے ہیں۔ ہائیڈرولک سلنڈروں کا استعمال کرتے ہوئے فیڈ باکس میں گیئر بلاکس کو تبدیل کرکے فیڈ کی شرح میکانکی طور پر ایڈجسٹ کی جاتی ہے۔سپنڈل کے مطلوبہ انقلابات اور فیڈز کی ترتیب سپورٹ ایپرن پر واقع ہائیڈرولک سوئچ کے ہینڈلز کی مدد سے اور متعلقہ ہائیڈرولک سلنڈروں کے ہائیڈرولک سپول پر عمل کرتے ہوئے کی جاتی ہے۔
مشین کی الیکٹرک ڈرائیوز کے تمام کنٹرول گیئر باکس کے سامنے والے پینل پر واقع پینل پر موجود ہیں۔
ماڈل 1565 بورنگ لیتھ الیکٹرک ڈرائیو
 مشین کی فیس پلیٹ ڈی سی موٹر سے گردش حاصل کرتی ہے (Pnom = 70 kW، Unom = 440 V، nnom = 500 rpm، nmax = 1500 rpm) V- بیلٹ ٹرانسمیشن کے ذریعے، دستی شفٹنگ کے ساتھ ایک دو اسپیڈ گیئر باکس اور ایک بیول گیئر.
مشین کی فیس پلیٹ ڈی سی موٹر سے گردش حاصل کرتی ہے (Pnom = 70 kW، Unom = 440 V، nnom = 500 rpm، nmax = 1500 rpm) V- بیلٹ ٹرانسمیشن کے ذریعے، دستی شفٹنگ کے ساتھ ایک دو اسپیڈ گیئر باکس اور ایک بیول گیئر.
چہرے کی پلیٹ کی گردش کی رفتار 0.4 سے 20.7 rpm کی حد میں کنٹرول کی جاتی ہے۔ الیکٹرک موٹر کی کونیی رفتار کو رینج D = 5.7 میں آرمیچر وولٹیج اور حد d = 3 میں ایکسائٹیشن کرنٹ کو تبدیل کر کے ایڈجسٹ کیا جا سکتا ہے۔ فیڈر ڈرائیو — مرکزی موٹر سے فیڈ باکس کے ذریعے — 0.2 سے 16mm/rev رینج میں 12 فیڈ فراہم کرتی ہے۔
مشین کا Thyristor الیکٹرک ڈرائیو لیتھ-کیروسل منفی آراء کے ساتھ خودکار رفتار کے استحکام کے لیے ایک بند نظام ہے، جس کو استعمال کرتے ہوئے لاگو کیا جاتا ہے۔ tachogenerator.
ٹرننگ لیتھ میں فیس پلیٹ اسٹاپ ٹائم کو کم کرنے کے لیے، مین ڈرائیو کا الیکٹرک اسٹاپ استعمال کیا جاتا ہے۔ اس صورت میں، کنٹرول وولٹیج کی قطبیت کو تبدیل کر دیا جاتا ہے اور موٹر کو جنریٹر آپریشن موڈ میں منتقل کر دیا جاتا ہے۔