برقی مقناطیسی ریلے کے بنیادی پیرامیٹرز اور خصوصیات
 ایک برقی آلات جو ریلے کنٹرول قانون کا اطلاق کرتا ہے اسے ریلے کہا جاتا ہے... ایک ریلے میں، جب کنٹرول (ان پٹ) پیرامیٹر کو آسانی سے ایک خاص سیٹ ویلیو میں تبدیل کیا جاتا ہے، تو کنٹرول شدہ (آؤٹ پٹ) پیرامیٹر اچانک بدل جاتا ہے۔ اس کے علاوہ، کم از کم ان پیرامیٹرز میں سے ایک برقی ہونا ضروری ہے۔
ایک برقی آلات جو ریلے کنٹرول قانون کا اطلاق کرتا ہے اسے ریلے کہا جاتا ہے... ایک ریلے میں، جب کنٹرول (ان پٹ) پیرامیٹر کو آسانی سے ایک خاص سیٹ ویلیو میں تبدیل کیا جاتا ہے، تو کنٹرول شدہ (آؤٹ پٹ) پیرامیٹر اچانک بدل جاتا ہے۔ اس کے علاوہ، کم از کم ان پیرامیٹرز میں سے ایک برقی ہونا ضروری ہے۔
فعال اعضاء کا عمل برقی مقناطیسی ریلے انجیر میں دیے گئے خاکے کے مطابق پتہ لگایا جا سکتا ہے۔ 1. وصول کرنے والا باڈی A مقناطیسی سرکٹ 1 کے کوائل 2 کو فراہم کردہ ان پٹ ویلیو (وولٹیج) Uin کو انٹرمیڈیٹ ویلیو میں تبدیل کرتا ہے، یعنی اینکر کی مکینیکل قوت میں 3۔ اینکر FЯ کی میکانکی قوت ایگزیکٹو باڈی B کے رابطہ نظام پر کام کرتی ہے۔ انٹرمیڈیٹ ویلیو — اینکر FЯ کی قوت، ان پٹ ویلیو Uin کے متناسب ہے، کا موازنہ a کے ساتھ کیا جاتا ہے۔ انٹرمیڈیٹ باڈی B کے بہار 9 کے ذریعہ تیار کردہ فورس Fpr کی دی گئی قدر۔ جب Uin <Uav, Fya
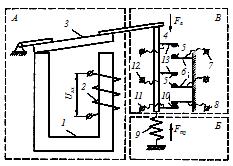 چاول۔ 1 برقی مقناطیسی ریلے کی اسکیم
چاول۔ 1 برقی مقناطیسی ریلے کی اسکیم
آپریشن کے عمل میں، ٹائم اسکیل پر برقی مقناطیسی ریلے چار مرحلوں میں فرق کرتا ہے: ایکٹیویشن ٹی وی کا دورانیہ (وقت)، کام کا دورانیہ دورک، بند کرنے کی مدت (وقت)، آرام کی مدت (وقت) 2)۔
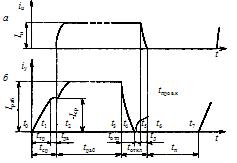
چاول۔ 2. وقت پر آؤٹ پٹ (a) اور آؤٹ پٹ (b) کی مقدار کا انحصار
برقی مقناطیسی ریلے کے عمل کی مدت
 ردعمل کی مدت میں وقت کا وقفہ شامل ہوتا ہے جب سے ان پٹ سگنل مانیٹرنگ باڈی کو متاثر کرنا شروع کرتا ہے جب تک کہ کنٹرولڈ سرکٹ میں سگنل ظاہر نہ ہو۔ abscissa axis tav = t2 –t0 کا طبقہ انجیر میں اس مدت سے مساوی ہے۔ 2، ب. اس وقت t0 ریلے کوائل میں کرنٹ ایک قدر تک بڑھ جاتا ہے جس پر آرمچر پر کام کرنے والی برقی مقناطیسی قوت Fe انٹرمیڈیٹ باڈی کی سپرنگ فورس Fm (مکینیکل فورس) کی مخالفت کرنا شروع کر دیتی ہے۔ ان پٹ ویلیو کو قبولیت کی قدر کہا جاتا ہے۔
ردعمل کی مدت میں وقت کا وقفہ شامل ہوتا ہے جب سے ان پٹ سگنل مانیٹرنگ باڈی کو متاثر کرنا شروع کرتا ہے جب تک کہ کنٹرولڈ سرکٹ میں سگنل ظاہر نہ ہو۔ abscissa axis tav = t2 –t0 کا طبقہ انجیر میں اس مدت سے مساوی ہے۔ 2، ب. اس وقت t0 ریلے کوائل میں کرنٹ ایک قدر تک بڑھ جاتا ہے جس پر آرمچر پر کام کرنے والی برقی مقناطیسی قوت Fe انٹرمیڈیٹ باڈی کی سپرنگ فورس Fm (مکینیکل فورس) کی مخالفت کرنا شروع کر دیتی ہے۔ ان پٹ ویلیو کو قبولیت کی قدر کہا جاتا ہے۔
ابتدائی مدت سیگمنٹ ttr = t1 — t0 سے مساوی ہے۔ T1 کے وقت، ریلے برقی مقناطیس کا بازو حرکت کرنا شروع کر دیتا ہے۔ tdv = t2 — t1 کے دوران، اینکر حرکت کرتا ہے، انٹرمیڈیٹ باڈی B کی مزاحمت پر قابو پاتا ہے (تصویر 1 دیکھیں) اور ایگزیکٹیو باڈی C کو فعال کرتا ہے۔
آرمیچر اسٹروک کے اختتام پر، ڈرائیو کے رابطے بند ہو جاتے ہیں، (تصویر 2، اے) میں لوڈ کرنٹ صفر سے ایک توازن کی قدر تک بڑھنا شروع ہو جاتا ہے۔ ان پٹ ویلیو جس پر آؤٹ پٹ سرکٹ کا کنٹرول شروع ہوتا ہے اسے قبولیت قدر (Iav) کہا جاتا ہے۔ اسر سے مطابقت رکھنے والی طاقت Psr کو عمل کرنے والی طاقت کہا جاتا ہے۔
رسپانس ٹائم t cf = ttr + tdv۔
برقی مقناطیسی ریلے کا ردعمل کا وقت 1-2 سے 20 ms تک مختلف ہوتا ہے۔ برقی مقناطیسی ٹائم ریلے 10 سیکنڈ تک کی تاخیر فراہم کرتے ہیں۔
ریلے کے رسپانس ٹائم کا اندازہ لگانے کے لیے، اظہار کا استعمال جائز ہے۔
t cf = t1kz-bm -a،
جہاں t1 دیے گئے حفاظتی عنصر ks اور عنصر m = 1 کے لیے ردعمل کا وقت ہے؛ a, b — گتانک جو ریلے کی قسم اور kz اور m کی قدروں پر منحصر ہوتے ہیں۔
kz = 1.5¸2 پر تیز رفتار ریلے کے لیے، گتانک کی قدر اتحاد تک پہنچتی ہے۔ k z = 1.5¸3 کے ساتھ عام ریلے کے لیے، قدر a = 0.25¸0.95، گتانک b کی قدر عام طور پر 1.4-1.6 کی حد میں ہوتی ہے۔
برقی مقناطیسی ریلے کی آپریٹنگ مدت
 کام کی مدت میں وقت کا وقفہ شامل ہوتا ہے twork = t3 — t2، یعنی آؤٹ پٹ سرکٹ T2 کے کنٹرول کے لمحے سے لے کر ان پٹ سگنل t3 کے حساس عضو پر اثر کے خاتمے کے لمحے تک کا وقت۔ کرنٹ آئی ورک (تصویر 2، بی) کی ایک سٹیشنری ویلیو تک بڑھنا شروع ہوتا ہے — یہ ان پٹ ویلیو کی ورکنگ ویلیو ہے، جو ریلے کے قابل اعتماد آپریشن کو یقینی بناتی ہے۔
کام کی مدت میں وقت کا وقفہ شامل ہوتا ہے twork = t3 — t2، یعنی آؤٹ پٹ سرکٹ T2 کے کنٹرول کے لمحے سے لے کر ان پٹ سگنل t3 کے حساس عضو پر اثر کے خاتمے کے لمحے تک کا وقت۔ کرنٹ آئی ورک (تصویر 2، بی) کی ایک سٹیشنری ویلیو تک بڑھنا شروع ہوتا ہے — یہ ان پٹ ویلیو کی ورکنگ ویلیو ہے، جو ریلے کے قابل اعتماد آپریشن کو یقینی بناتی ہے۔
تناسب Iwork / Icr = kz کو کام پر حفاظت کا عنصر کہا جاتا ہے۔
ریلے کے حساس عنصر کی اوورلوڈ صلاحیت کو نمایاں کرنے کے لیے، ان پٹ مقدار کی قدر کا استعمال کیا جاتا ہے، جسے آپریٹنگ مقدار Ioperating.max کی حد قدر کہا جاتا ہے۔
کام کرنے کی قدر کی حد - یہ اس کی قدر ہے جسے حساس عضو مختصر وقت کے لیے برداشت کر سکتا ہے۔ تاہم، اس قدر کی قدر ناقابل قبول ہے جب ریلے برقی یا مکینیکل طاقت یا حرارت کی حالت کی وجہ سے نارمل موڈ میں کام کر رہا ہو۔
کنٹرول پاور تصور Ru کا استعمال ریلے ڈرائیو کی بوجھ اٹھانے کی صلاحیت کو نمایاں کرنے کے لیے کیا جاتا ہے۔ کنٹرول پاور کنٹرولڈ سرکٹ میں وہ طاقت ہے جسے ڈرائیو طویل عرصے تک منتقل کر سکتی ہے۔
برقی مقناطیسی ریلے کے سفر کا دورانیہ
 آف پیریڈ میں ٹائم وقفہ ٹوف = t6 — t3 ہوتا ہے، یعنی محسوس کرنے والے عضو T3 پر اثر کے خاتمے کے لمحے سے اس لمحے تک جب کنٹرولڈ سرکٹ میں کرنٹ کم ہو کر صفر ہو جاتا ہے (تصویر 16، اے)۔
آف پیریڈ میں ٹائم وقفہ ٹوف = t6 — t3 ہوتا ہے، یعنی محسوس کرنے والے عضو T3 پر اثر کے خاتمے کے لمحے سے اس لمحے تک جب کنٹرولڈ سرکٹ میں کرنٹ کم ہو کر صفر ہو جاتا ہے (تصویر 16، اے)۔
آف پیریڈ میں ریلیز کا دورانیہ شامل ہوتا ہے totp = t4 — t3 جس میں ریلے بند ہوتا ہے۔ ریلے کوائل میں موجودہ iy صفر پر گر جاتا ہے (تصویر 2، بی)۔ اس مدت کے دوران مخالف سپرنگ فورس (مکینیکل فورس) برقی مقناطیسی قوت سے زیادہ ہو جاتی ہے، یعنی Fm> Fe اور آرمیچر جاری کیا جاتا ہے۔
رابطہ کی ناکامی (وقفہ tc = t5 — t4) کو منتخب کرنے کے بعد، ریلے کے رابطے کھل جاتے ہیں اور ان کے درمیان ایک قوس جل جاتا ہے، جو وقت کے بعد بجھ جاتا ہے td = t6 — t5۔ ٹی ڈی کی مدت کے دوران، کنٹرولڈ سرکٹ میں کرنٹ ان سے صفر تک کم ہو جاتا ہے (تصویر 2، اے)۔
آف ٹائم t t = tp + tc + td۔
ٹرپنگ پیریڈ ایک ریکوری فیکٹر کی خصوصیت رکھتا ہے، جو کہ ڈراپ کرنٹ Iotp کا پک اپ کرنٹ Iav کا تناسب ہے: kv = Iotp/Icr۔
عام طور پر، پاور سسٹم پروٹیکشن ریلے اور کنٹرول ریلے کے لیے جو ان پٹ پیرامیٹر کو تنگ حدود میں کنٹرول کرتے ہیں، kv کو اتحاد کے قریب ہونا چاہیے۔
برقی مقناطیسی ریلے کی باقی مدت
باقی مدت وقت کا وقفہ ہے tp = t7 — t6۔
تاخیر کا دورانیہ ایک پیرامیٹر کے ذریعہ خصوصیت رکھتا ہے جسے غیر فعال قدر کہا جاتا ہے، جو ان پٹ کی مقدار کی سب سے بڑی قدر ہے جو اس بات کو یقینی بناتا ہے کہ ریلے کام نہیں کرتا ہے یا منعقد نہیں ہوتا ہے۔ شٹ ڈاؤن کا وقت آپریٹنگ اسٹارٹ اپ ٹائم اور ریلیز کے وقت سے کم ہے۔
کنٹرول پاور اور ایکٹیویشن پاور کے تناسب کو گین کہتے ہیں، ku = Py/Pcr۔
فی یونٹ وقت کے آغاز کی تعداد کا تعین اس قدر سے ہوتا ہے جو سائیکل کے وقت کے الٹا متناسب ہوتا ہے:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
لکوٹا او بی