برقی مقناطیسی بریک کرنے والے آلات
کچھ آلات میں، الیکٹرک موٹر پر برقی مقناطیسی ڈسک بریک کا استعمال مشین کے گھومنے والے عناصر کو روکنے کے لیے کیا جاتا ہے۔ برقی بریک لگانے والا آلہ براہ راست موٹر میں یا موٹر پر نصب ہوتا ہے اور یہ بنیادی طور پر ایک معاون موٹر یا ڈرائیو یونٹ ہے جو آلے کی پوزیشننگ اور اس کے محفوظ آپریشن کے لحاظ سے تمام ضروریات کو پورا کرتا ہے۔ یہ ایک بہار کے ساتھ لاگو اور جاری کیا جاتا ہے ایک برقی مقناطیس کے ساتھ.
یہ حل نہ صرف حادثے کی صورت میں انجن کے محفوظ سٹاپ کو یقینی بناتا ہے یا اس کے آپریشن کے دوران مشین کے ایگزیکٹو عنصر کو پوزیشن میں رکھتا ہے، بلکہ اس کے سٹاپ کے دوران مشین کے آپریشن کے وقت کو بھی کم کرتا ہے۔
برقی مقناطیسی ڈسک بریک کی دو قسمیں ہیں: AC ڈسک بریک اور DC ڈسک بریک (بریک کو طاقت دینے والے کرنٹ کی شکل پر منحصر ہے)۔ بریک کے DC ورژن کے لیے، موٹر کو ایک ریکٹیفائر بھی فراہم کیا جاتا ہے، جس کے ذریعے AC سے DC حاصل کیا جاتا ہے جو خود موٹر کو طاقت دیتا ہے۔
بریکنگ ڈیوائس کے ڈیزائن میں شامل ہیں: برقی مقناطیس، آرمچر اور ڈسک۔ برقی مقناطیس ایک خاص صورت میں واقع کنڈلی کے سیٹ کی شکل میں بنایا گیا ہے۔ آرمیچر بریک لگانے کے طریقہ کار کے طور پر کام کرتا ہے اور یہ ایک اینٹی رگڑ سطح ہے جو بریک ڈسک کے ساتھ تعامل کرتی ہے۔
ڈسک خود، اس پر لاگو رگڑ مواد کے ساتھ، موٹر شافٹ پر آستین کے دانتوں کے ساتھ ساتھ چلتا ہے. جب بریک کوائلز پر وولٹیج کا اطلاق ہوتا ہے، تو آرمچر کھینچ لیا جاتا ہے اور موٹر شافٹ بریک ڈسک کے ساتھ آزادانہ طور پر گھوم سکتا ہے۔
بریک مفت حالت میں فراہم کی جاتی ہے جب اسپرنگس آرمیچر کو دباتے ہیں اور یہ بریک ڈسک پر کام کرتا ہے، اس طرح شافٹ کو روکتا ہے۔
اس قسم کے بریک بڑے پیمانے پر الیکٹرک ڈرائیو سسٹم میں استعمال ہوتے ہیں۔ بریک لگانے والے آلے میں ایمرجنسی پاور فیل ہونے کی صورت میں، بریک کو دستی طور پر چھوڑنا ممکن ہو سکتا ہے۔
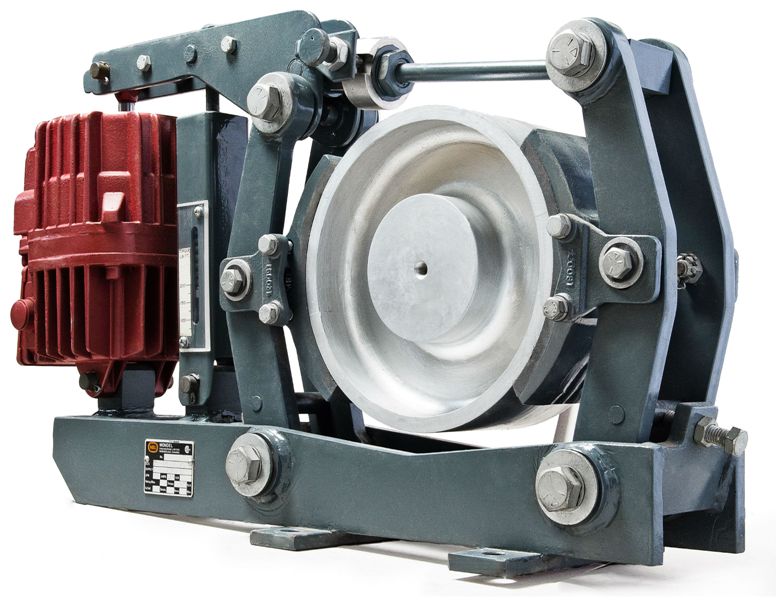
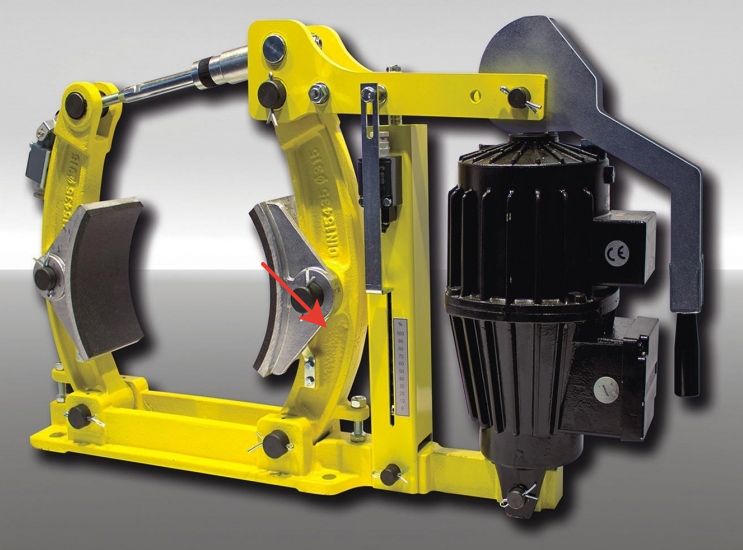
مشین کے بند ہونے پر شافٹ کو بریک والی حالت میں رکھنے کے لیے لہرانے والے الیکٹرو میگنیٹک شو بریک (TKG) کا استعمال کرتے ہیں۔
TKP - MP سیریز DC بریک۔ TKG - الیکٹرو ہائیڈرولک ٹیپیٹ بریک، TE سیریز۔ TKG بریک سولینائیڈ میں ایک ڈرائیو اور مکینیکل حصہ شامل ہوتا ہے، جس کے نتیجے میں: ایک اسٹینڈ، اسپرنگس، ایک لیور سسٹم اور بریک پیڈز شامل ہوتے ہیں۔
بریک یونٹ عمودی طور پر بریک ڈسک کے ساتھ افقی پوزیشن میں نصب کیا جاتا ہے۔ AC یا DC سے چلنے والے بریک آلات کے مکینیکل حصے ایک ہی قطر کے رولرس کے لیے ایک جیسے ہیں۔
عام طور پر، اس طرح کے آلات میں خط کا عہدہ TK اور ایک نمبر ہوتا ہے جو بریک رولر کے قطر کو ظاہر کرتا ہے۔ جب پاور آن ہوتی ہے تو، لیور اسپرنگس کی کارروائی کو بے اثر کرتے ہیں اور گھرنی کو آزاد گھومنے کی اجازت دینے کے لیے چھوڑ دیتے ہیں۔

برقی مقناطیسی بریکوں میں استعمال کیا جاتا ہے:
-
کرینوں، لفٹوں، بچھانے والی مشینیں وغیرہ کو روکنا۔ آف حالت میں؛ کنویئرز، سمیٹنے اور بنائی مشینیں، والوز، موبائل آلات وغیرہ کو روکنے کے طریقہ کار میں؛
-
مشینوں کے ڈاؤن ٹائم (شٹ ڈاؤن کے دوران ڈاؤن ٹائم) کو کم کرنے کے لیے؛
-
ایسکلیٹرز، ایجیٹیٹرز، وغیرہ وغیرہ کے لیے ایمرجنسی اسٹاپ سسٹم میں؛
-
وقت کے ایک خاص مقام پر صحیح پوزیشن کی پوزیشننگ کے ساتھ روکنا۔
ڈرلنگ پلیٹ فارمز میں، انڈکشن بریک کا استعمال ایک انڈکٹر کے مقناطیسی شعبوں کے تعامل کی بنیاد پر کیا جاتا ہے، جس کے کردار میں ایک برقی مقناطیس کام کرتا ہے، اور ایک آرمچر، جس کے کنڈلی میں کرنٹ لگتے ہیں، جن کے مقناطیسی میدان سست ہو جاتے ہیں۔ "وہ وجہ جو ان کا سبب بنتی ہے" (دیکھیں۔ لینز کا قانون)، اس طرح روٹر کے لیے ضروری بریک ٹارک پیدا ہوتا ہے۔

آئیے تصویر میں اس رجحان کو دیکھتے ہیں۔ جب اسٹیٹر وائنڈنگ میں کرنٹ آن کیا جاتا ہے، تو اس کا مقناطیسی میدان روٹر میں ایک ایڈی کرنٹ پیدا کرتا ہے۔ روٹر میں ایڈی کرنٹ ایمپیئر کی قوت سے متاثر ہوتا ہے، جس کا لمحہ اس صورت میں سست ہوجاتا ہے۔
جیسا کہ آپ جانتے ہیں، الٹرنیٹنگ کرنٹ کے ساتھ ہم وقت ساز اور ہم وقت ساز مشینیں، نیز ڈائریکٹ کرنٹ والی مشینیں، جب شافٹ اسٹیٹر کے نسبت حرکت کرتا ہے، بریک موڈ میں کام کر سکتی ہیں۔ اگر شافٹ ساکن ہے (کوئی رشتہ دار حرکت نہیں ہے)، تو بریک لگانے کا کوئی اثر نہیں ہوگا۔
اس طرح، موٹر پر مبنی بریکوں کا استعمال شافٹ کو آرام سے رکھنے کے بجائے حرکت پذیری کو روکنے کے لیے کیا جاتا ہے۔ ایک ہی وقت میں، میکانزم کی نقل و حرکت میں کمی کی شدت کو ایسے معاملات میں آسانی سے ایڈجسٹ کیا جا سکتا ہے، جو کبھی کبھی آسان ہوتا ہے۔
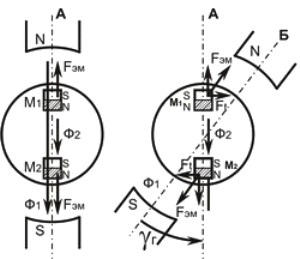
مندرجہ ذیل تصویر ہسٹریسیس بریک کے آپریشن کو ظاہر کرتی ہے۔جب اسٹیٹر وائنڈنگ کو کرنٹ فراہم کیا جاتا ہے تو، ٹارک روٹر پر کام کرتا ہے، اس صورت میں یہ رک جاتا ہے اور یہاں ایک یک سنگی روٹر کے مقناطیسی عمل کے الٹ جانے سے ہسٹریسیس کے رجحان کی وجہ سے ہوتا ہے۔
جسمانی وجہ یہ ہے کہ روٹر کی میگنیٹائزیشن ایسی ہو جاتی ہے کہ اس کا مقناطیسی بہاؤ سٹیٹر کے بہاؤ کی سمت میں موافق ہوتا ہے۔ اور اگر آپ اس پوزیشن سے روٹر کو گھمانے کی کوشش کرتے ہیں (تاکہ اسٹیٹر روٹر کے نسبت B پوزیشن پر ہو)، یہ مقناطیسی قوتوں کے ٹینجینٹل اجزاء کی وجہ سے A پوزیشن پر واپس آنے کی کوشش کرے گا- اور اس طرح بریک لگتی ہے۔ اس معاملے میں.