ریورس ایبل سنگل فیز موٹر
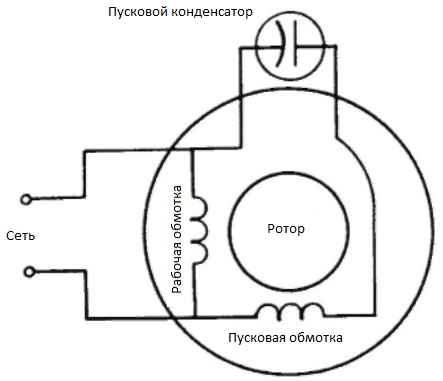
انڈکشن موٹر کو سنگل فیز موٹر کہا جاتا ہے، جس کے سٹیٹر پر صرف ایک کام کرنے والی وائنڈنگ ہوتی ہے، جو نیٹ ورک کے ایک فیز سے براہ راست فراہم کی جاتی ہے۔ سنگل فیز موٹر میں ایک معاون (اسٹارٹنگ) وائنڈنگ بھی ہوتی ہے، جو صرف موٹر کو شروع کرنے کے وقت روٹر کو ابتدائی تحریک دینے کے لیے استعمال کی جاتی ہے، درحقیقت، روٹر کو باہر لے جانے کے لیے اسٹارٹنگ وائنڈنگ کو آن کیا جاتا ہے۔ توازن کی پوزیشن، ورنہ یہ مدد کے بغیر حرکت نہیں کرے گا اور اسے کسی اور طریقے سے دھکیلنا پڑے گا۔
کسی بھی موٹر کی طرح، سنگل فیز موٹر میں بھی ایک روٹر ہوتا ہے جو گھومتا ہے اور ایک سٹیٹر جو ساکن ہوتا ہے لیکن صرف وقت کے لحاظ سے مختلف مقناطیسی فیلڈ بنانے کا کام کرتا ہے۔ ورکنگ اور سٹارٹنگ وائنڈنگ سٹیٹر پر ایک دوسرے کے دائیں زاویوں پر واقع ہیں، اور ورکنگ وائنڈنگ سٹارٹنگ وائنڈنگ سے دو گنا زیادہ سلاٹ پر قبضہ کرتی ہے۔
ہم کہہ سکتے ہیں کہ شروع ہونے کے وقت، اس طرح کی موٹر دو فیز کے طور پر کام کرتی ہے، اور پھر آپریشن کے سنگل فیز موڈ میں بدل جاتی ہے۔ سنگل فیز غیر مطابقت پذیر موٹر کا روٹر سب سے عام تعمیر ہے - گلہری کیج (گلہری پنجرا) یا بیلناکار (کھوکھلا)۔
کیا ہوگا اگر سٹیٹر پر کوئی سٹارٹر وائنڈنگ بالکل بھی نہ ہو، یا یہ موجود تھا لیکن استعمال نہ کیا گیا ہو۔ اس صورت میں، جب موٹر نیٹ ورک سے منسلک ہوتی ہے، تو کام کرنے والی کنڈلی میں ایک دھڑکتی ہوئی مقناطیسی فیلڈ نمودار ہوگی، اور روٹر اس میں داخل ہونے والے بدلتے ہوئے مقناطیسی بہاؤ کے حالات میں گرے گا۔
لیکن اگر روٹر شروع میں ساکن ہو اور ہم اچانک صرف ورکنگ کوائل پر ایک متبادل کرنٹ لگائیں، تو روٹر اپنی جگہ سے نہیں ہلے گا، کیونکہ ای ایم ایف کی حوصلہ افزائی کے باوجود کل ٹارک (کلاک وائز اور اینٹی کلاک وائز) صفر ہو جائے گا۔ روٹر اور گردش کی کوئی وجہ نہیں ہے کیونکہ ایمپیئر کی ابھرتی ہوئی قوتیں ایک دوسرے کو منسوخ کر دیتی ہیں۔
یہ بالکل الگ معاملہ ہے، اگر روٹر کو دھکا دیا جائے تو یہ اسی سمت میں گھومتا رہے گا جس طرح ابتدائی دھکا تھا، کیونکہ اب نہ صرف برقی مقناطیسی انڈکشن کے قانون کے مطابق، ایک EMF کو روٹر میں شامل کیا جائے گا اور، اس کے مطابق، دھارے پیدا ہوں گے، جو ایمپیئرز کے قانون کے مطابق مقناطیسی میدان کے ذریعے پسپا ہو جائیں گے، لیکن یہ بھی (چونکہ روٹر پہلے سے گردش کر چکا ہے) دھکا کی سمت میں نتیجے میں آنے والا ٹارک دھکا کی سمت کے خلاف ٹارک سے زیادہ ہو گا۔ . نتیجے کے طور پر، ہم روٹر کی مسلسل گردش حاصل کرتے ہیں.
سٹارٹنگ وائنڈنگ کے لیے روٹر کو ابتدائی لمحے میں دھکیلنے کے لیے، اسے کام کرنے والی وائنڈنگ کے مقابلے میں نہ صرف خلا میں منتقل کیا جانا چاہیے، بلکہ اس میں موجود کرنٹ کو بھی ورکنگ وائنڈنگ کرنٹ کے حوالے سے فیز میں منتقل کیا جانا چاہیے، پھر ان دو سٹیٹر وائنڈنگز کا مشترکہ عمل نہ صرف ایک پلسٹنگ مقناطیسی فیلڈ کے برابر ہوگا، بلکہ پہلے سے گھومنے والے مقناطیسی میدان کے برابر ہوگا۔ اور یہ بالکل وہی ہے جو سنگل فیز موٹر کے آغاز کے دوران روٹر کو تیز کرنے کی ضرورت ہے۔
سٹارٹنگ وائنڈنگ میں کرنٹ کو فیز شفٹ کرنے کے لیے، عام طور پر مطلوبہ کیپیسیٹینس کا ایک کپیسیٹر استعمال کیا جاتا ہے، جو سٹارٹنگ وائنڈنگ کے ساتھ سیریز میں منسلک ہوتا ہے اور 90 ڈگری کی فیز شفٹ بناتا ہے۔ یہ سپلٹ فیز موٹرز کے لیے معیاری حل ہے۔
جیسے ہی موٹر نیٹ ورک سے منسلک ہوتی ہے، آپریٹر سوئچ بٹن دباتا ہے، جو کوائل اسٹارٹ سرکٹ کو توانائی فراہم کرتا ہے، اور جیسے ہی رفتار نیٹ ورک کی دی گئی فریکوئنسی پر درجہ بندی کے مطابق مطلوبہ قدر تک پہنچ جاتی ہے، بٹن جاری ہے.
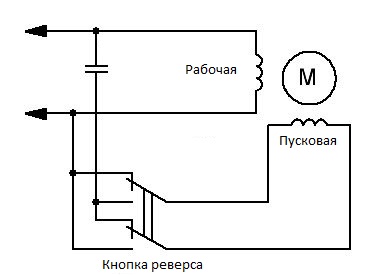
سنگل فیز کیپسیٹر-اسٹارٹ موٹر کو ریورسل حاصل کرنے کے لیے، یہ ایسی شرط فراہم کرنا کافی ہے جہاں ابتدائی پلس اصل میں فراہم کی گئی سمت کے علاوہ کسی اور سمت میں فراہم کی جائے گی۔ یہ کام کرنے اور وائنڈنگ شروع کرنے میں مرحلے کی گردش کے رشتہ دار ترتیب کو تبدیل کرکے حاصل کیا جاتا ہے۔
ان حالات کو یقینی بنانے کے لیے، ورکنگ یا اسٹارٹنگ کوائل کو تبدیل کرنا ضروری ہے، یعنی اس کے ٹرمینلز کے نیٹ ورک یا نیٹ ورک اور کپیسیٹر سے کنکشن کی «پولرٹی» کو تبدیل کرنا۔ ایسا کرنا آسان ہے کیونکہ سنگل فیز موٹر پر ایک ٹرمینل بلاک ہوتا ہے جس میں شروع ہونے والی اور چلنے والی وائنڈنگز کے ہر ایک سرے کو باہر لایا جاتا ہے۔ چلنے والی کوائل میں شروع ہونے والی کوائل کے مقابلے میں کم فعال مزاحمت ہوتی ہے، اس لیے ملٹی میٹر سے اسے تلاش کرنا آسان ہے۔ بہترین حل یہ ہے کہ سٹارٹر کوائل کی تاروں کو دو قطبوں والے لمحاتی سوئچ پر لگا دیں۔