متحرک انجن بریک
 انجن کو تیز اور درست طریقے سے روکنے کے لیے ڈائنامک بریک کا استعمال کیا جاتا ہے۔ آپریشن کی تفصیل کے ساتھ انجن کی متحرک بریک کا خاکہ موجود ہے۔ یہاں… اسی مضمون میں، ہم گلہری-کیج اور فیز-روٹر انڈکشن موٹرز کی متحرک بریکنگ کے دوران ہونے والے جسمانی عمل پر غور کریں گے۔
انجن کو تیز اور درست طریقے سے روکنے کے لیے ڈائنامک بریک کا استعمال کیا جاتا ہے۔ آپریشن کی تفصیل کے ساتھ انجن کی متحرک بریک کا خاکہ موجود ہے۔ یہاں… اسی مضمون میں، ہم گلہری-کیج اور فیز-روٹر انڈکشن موٹرز کی متحرک بریکنگ کے دوران ہونے والے جسمانی عمل پر غور کریں گے۔
گلہری-کیج روٹر کی متحرک بریک مینز سے سٹیٹر وائنڈنگ منقطع کرنے کے بعد ہوتی ہے۔ کوائل کے ڈی سی سپلائی سے منسلک ہونے کے بعد موٹر رک جاتی ہے۔
سٹیٹر وائنڈنگ کے مراحل میں براہ راست کرنٹ ایک متعلقہ EMF کا سبب بنتا ہے، جو موٹر میں ایک ساکن مقناطیسی میدان کو اکساتی ہے۔ یہ گھومنے والے روٹر کے سمیٹنے والے مراحل میں بدلتی ہوئی ایم ایف اور کم ہوتی ہوئی فریکوئنسی کی دھاروں کو اکساتا ہے۔ لہذا، انڈکشن موٹر مقررہ مقناطیسی کھمبوں کے ساتھ الٹرنیٹر موڈ میں چلی جاتی ہے۔ اس موڈ میں، موٹر جڑت کے ذریعہ حرکت پذیر اور گھومنے والے پیداواری طریقہ کار کے روابط کی حرکی توانائی کو برقی توانائی میں بدلتی ہے، جو روٹر وائنڈنگ سرکٹ میں تھرمل توانائی میں تبدیل ہوجاتی ہے۔
روٹر وائنڈنگ کے مراحل میں کرنٹ کے ساتھ سٹیٹر سمیٹنے والی مقناطیسی قوت سے پرجوش مقناطیسی میدان کا تعامل ایک بریک ٹارک کی ظاہری شکل کا سبب بنتا ہے جس کے زیر اثر موٹر روٹر رک جاتا ہے۔
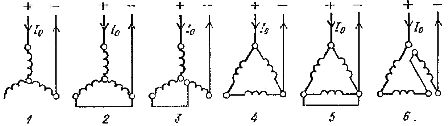
چاول۔ 1. ڈائنامک بریکنگ کے دوران مستقل وولٹیج کے لیے تھری فیز غیر سنکرونس موٹر کے سٹیٹر وائنڈنگ کے فیز کو آن کرنے کی اسکیمیں
بریک کے لمحے کی شدت سٹیٹر وائنڈنگ کی مقناطیسی قوت کی قدر، روٹر وائنڈنگ سرکٹ کے ایڈجسٹ ریزسٹرس کی فعال مزاحمت کی قدر اور اس کی رفتار پر منحصر ہے۔ تسلی بخش بریک لگانے کے لیے، DC کرنٹ انڈکشن موٹر کے نو لوڈ کرنٹ سے 4-5 گنا ہونا چاہیے۔

متحرک بریک کے دوران انڈکشن مشین کی مکینیکل خصوصیات اصل سے گزرتی ہیں، کیونکہ ابتدائی صفر کی رفتار سے بریک لگانے کا کوئی ٹارک نہیں ہوتا ہے۔ بریک لگانے کے زیادہ سے زیادہ لمحے کی قدر براہ راست کرنٹ میں اضافے کے ساتھ بڑھ جاتی ہے، لیکن یہ روٹر وائنڈنگ کے سرکٹ میں متعارف کرائے جانے والے ایڈجسٹ ریزسٹرس کی فعال مزاحمت کی قدر پر منحصر نہیں ہے، جو اس کی رفتار کا تعین کرتے ہیں، جس پر ٹارک پہنچتا ہے۔ قدر Mt = MlyulkaG... کسی وقفے کے لمحے میں Mt ریزسٹرس Rd کی فعال مزاحمت میں اضافہ روٹر کی رفتار میں اضافے کا باعث بنتا ہے۔
ہم آہنگی والی موٹروں کی متحرک بریکنگ ہم آہنگی کی رفتار سے کم رفتار اور اس سے زیادہ رفتار دونوں پر کافی اقتصادی اور قابل عمل ہے (تصویر 2)۔
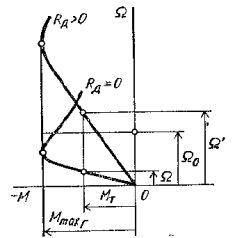
چاول۔ 2. متحرک بریک کے تحت تھری فیز زخم روٹر انڈکشن موٹر کی مکینیکل خصوصیات
گلہری-کیج روٹر کے ساتھ تھری فیز غیر مطابقت پذیر موٹرز کے لیے، کیپسیٹر بریک کا بھی اکثر استعمال کیا جاتا ہے، جس میں ایک سڈول تھری فیز کپیسیٹر بینک سٹیٹر وائنڈنگ کے ٹرمینلز سے منسلک ہوتا ہے، جو مشین کو مینز سے منقطع کرنے کے بعد اور روٹر جڑتا کے ذریعہ گھومتا ہے، سٹیٹر وائنڈنگ میں تین فیز سڈول وولٹیج سسٹم کو جوش دیتا ہے۔ جنریٹر موڈ میں مشین کی منتقلی کی وجہ سے، ایک بریک لمحہ واقع ہوتا ہے، جو موٹر روٹر کی رفتار کو کم کر دیتا ہے. اس کے بارے میں یہاں مزید پڑھیں: غیر مطابقت پذیر موٹروں کی کیپیسیٹر بریک