کارکردگی اور طاقت پر برقی موٹر لوڈ کا اثر
عام طور پر پاور ریزرو یا الیکٹرک موٹر کو کم لوڈ کرنے سے کارکردگی اور طاقت میں کمی واقع ہوتی ہے۔ کبھی کبھی نیٹ ورک سے الیکٹرک موٹر کے ذریعہ استعمال ہونے والی فعال اور رد عمل کی طاقت کی قدروں کا تعین کرنے کے لئے ان گتانکوں کی اصل قدروں کو جاننا ضروری ہوتا ہے۔
برائے نام سے کم بوجھ پر برقی موٹروں کی کارکردگی کا تعین اس فارمولے سے کیا جا سکتا ہے:
جہاں ηnom برقی موٹر کی برائے نام کارکردگی ہے۔
β کا تعین کرنے کے لیے، فارمولا استعمال کریں:

جہاں Kz اصل بوجھ کا برائے نام (لوڈ فیکٹر) کا تناسب ہے؛
α - گتانک کے برابر فرض کیا گیا:
• سیریز کے جوش کے ساتھ DC موٹرز کے لیے - 0.5 (کم رفتار کے لیے) سے 1 (تیز رفتار کے لیے)؛
• متوازی حوصلہ افزائی کے ساتھ الیکٹرک موٹرز کے لیے - 1 (کم رفتار کے لیے) سے 2 (تیز رفتار کے لیے)؛
• غیر مطابقت پذیر الیکٹرک موٹرز کے لیے — 0.5 سے 1 تک؛ کرین اور ہم وقت ساز الیکٹرک موٹرز کے لیے - 2 تک۔
اقدار پاور فیکٹر انڈکشن موٹر بہت سے عوامل پر منحصر ہے اور، سختی سے، ہر برقی موٹر کے لیے مختلف ہے، یہاں تک کہ ایک ہی قسم کی بھی۔
تاہم، ڈیزائن کے حالات میں متوقع بوجھ پر منحصر پاور فیکٹر کی صرف تخمینی اوسط قدروں کو جاننا کافی ہے۔
ایک آسان پائی چارٹ سے، درج ذیل تعلق حاصل کیا جاتا ہے:

عہدہ - انجیر دیکھیں۔ 1۔
جہاں tanφ1، الیکٹرک موٹر P1، kW کے اصل بوجھ کے مساوی فیز اینگل کا ٹینجنٹ ہے۔ tanφnom — الیکٹرک موٹر PH0M کے برائے نام بوجھ سے مماثل فیز شفٹ زاویہ کا ٹینجنٹ (جس کا تعین موٹر پاسپورٹ میں مخصوص cosφnom سے ہوتا ہے)؛ الٹنے والے لمحے کا تناسب برائے نام (1.8-2 کی تنگ حدود میں ہے)؛

K3 - لوڈ فیکٹر۔
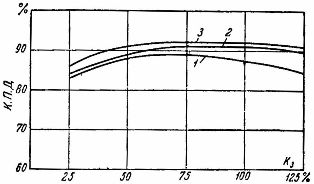
چاول۔ 1. بوجھ کے لحاظ سے غیر مطابقت پذیر مختلف الیکٹرک موٹروں کی کارکردگی کے منحنی خطوط۔
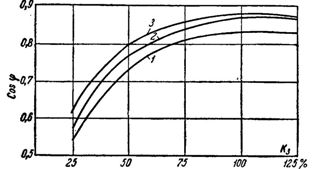
چاول۔ 2. بوجھ کے لحاظ سے غیر مطابقت پذیر الیکٹرک موٹرز کے پاور فیکٹر کے منحنی خطوط۔
غیر مطابقت پذیر الیکٹرک موٹروں کی سب سے عام اقسام کے بوجھ پر η اور cosφ کے انحصار کے منحنی خطوط تصویر میں دیے گئے ہیں۔ 1 اور 2۔