خود جوش کے ذریعے متحرک بریک کے موڈ میں آپریشن کے لیے ایک غیر مطابقت پذیر الیکٹرک موٹر کا انتخاب
 آسان ترین کنٹرول اسکیم کے ساتھ زخم روٹر کے ساتھ غیر مطابقت پذیر الیکٹرک موٹر - روٹر سرکٹ میں مزاحمت کی شمولیت انتہائی کم کنٹرول خصوصیات رکھتی ہے۔ اس لیے، مارکیٹ میں فریکوئنسی کنورٹرز کی دستیابی سے پہلے، اسٹیپ ڈاؤن موڈ میں کم رفتار حاصل کرنے کے لیے مختلف اسکیمیں تیار کی گئیں۔
آسان ترین کنٹرول اسکیم کے ساتھ زخم روٹر کے ساتھ غیر مطابقت پذیر الیکٹرک موٹر - روٹر سرکٹ میں مزاحمت کی شمولیت انتہائی کم کنٹرول خصوصیات رکھتی ہے۔ اس لیے، مارکیٹ میں فریکوئنسی کنورٹرز کی دستیابی سے پہلے، اسٹیپ ڈاؤن موڈ میں کم رفتار حاصل کرنے کے لیے مختلف اسکیمیں تیار کی گئیں۔
دراصل، ان میں سے اتنے زیادہ نہیں ہیں۔ بیرون ملک، ایک اضافی الیکٹرک مشین کا استعمال - ایک وورٹیکس بریک جو مین انجن کی طرح ایک ہی شافٹ پر لگا ہوا ہے - بڑے پیمانے پر ہو گیا۔ یہ اسکیم آپ کو بوجھ کو کم کرتے وقت کافی سخت مکینیکل خصوصیات حاصل کرنے کی اجازت دیتی ہے، لیکن اس طرح کی الیکٹرک ڈرائیو میں انتہائی کم توانائی کی خصوصیات ہوتی ہیں (بریکنگ انرجی بھنور بریک میں جاری ہوتی ہے)۔ اس کے علاوہ، وورٹیکس بریک کی قیمت کافی زیادہ ہے اور میکینیکل حصے کی ترتیب کو بہت پیچیدہ بنا دیتا ہے۔
لہذا، 1970 کی دہائی کے آخر میں ڈائنمو پلانٹ میں فیز روٹر کے ساتھ ایک غیر مطابقت پذیر موٹر پر مبنی لفٹنگ میکانزم میں لینڈنگ کی رفتار حاصل کرنے کے لیے، ایک ڈیزائن ٹیم جس کی قیادت E.M. پیوزنر نے خود پرجوش متحرک بریکنگ متعارف کرائی۔
اس طرح کی الیکٹرک ڈرائیو گھریلو کرینوں میں بڑے پیمانے پر استعمال ہوتی ہے (TSD، TSDI، KSDB قسم کے پینل پل، گینٹری اور گینٹری کرینز، ٹاور کرینوں کے لیے کنٹرول پینل KB-309, KB-403, KB-404, KB-405, KB - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P)۔ اس طرح، ہم آپریشن میں ہزاروں کرینوں کے بارے میں بات کر رہے ہیں.
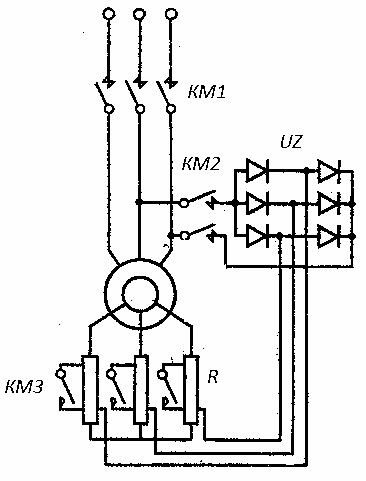
چاول۔ 1. خود جوش کے ذریعہ متحرک بریک موڈ میں ایک غیر مطابقت پذیر موٹر کو شامل کرنے کی اسکیم
خود جوش کے ساتھ متحرک بریک کا اصول مندرجہ ذیل ہے:
روٹر سرکٹ پر مشتمل ہے۔ تین مرحلے کو درست کرنے والا UZ (تصویر 1)۔ الیکٹرک موٹر کونٹیکٹر KM1 کے ذریعے نیٹ ورک سے منقطع ہے۔ درست شدہ وولٹیج کنیکٹر KM2 کے ذریعے سٹیٹر وائنڈنگ سے منسلک ہے۔ رابطہ کنندہ کے رابطے KM3 بند ہیں۔ جب بریک جاری کی جاتی ہے (ڈائیگرام میں نہیں دکھایا گیا)، تو موٹر شافٹ گرتے ہوئے وزن کی کارروائی کے تحت گھومنا شروع کر دیتا ہے۔
ایک EMF کو روٹر وائنڈنگ میں شامل کیا جاتا ہے، جس کے زیر اثر روٹر سٹیٹر سرکٹ میں کرنٹ بہنا شروع ہو جاتا ہے۔ موٹر بریک ٹارک تیار کرتی ہے، بوجھ کو مستقل رفتار سے کم کیا جاتا ہے۔ رفتار کی قدر کا تعین روٹر سرکٹ کی مزاحمتی قدر سے کیا جاتا ہے۔ مزاحمت جتنی زیادہ ہوگی، نزول کی شرح اتنی ہی تیز ہوگی۔ رفتار بڑھانے کے لیے، کنٹیکٹر KM3 بند ہے۔
خود حوصلہ افزائی کے متحرک بریک موڈ میں، الیکٹرک ڈرائیو صرف بریک ہائیڈرولک پشر اور ریلے کنٹیکٹر کے آلات کو پاور کرنے کے لیے نیٹ ورک سے بجلی استعمال کرتی ہے۔ مثال کے طور پر، تصویر. 7 ٹی ایس ڈی پینل کے ساتھ الیکٹرک ڈرائیو کی مکینیکل خصوصیات کو ظاہر کرتا ہے۔
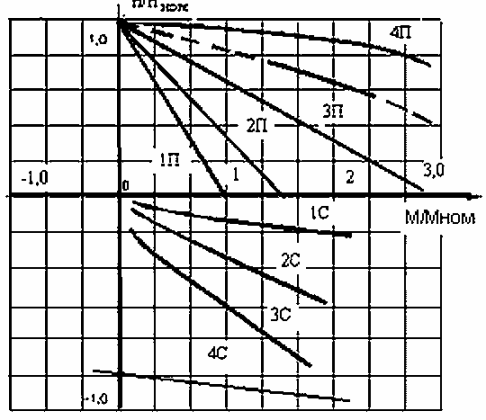
چاول۔ 2. TSD پینل کے ساتھ لفٹنگ میکانزم کی الیکٹرک ڈرائیو کی مکینیکل خصوصیات
متحرک بریک کی خصوصیات کو 1C، 2C، 3C کے طور پر نامزد کیا گیا ہے۔ یہ دیکھا جاسکتا ہے کہ خصوصیات میں کافی سختی ہے۔ رفتار کی ایڈجسٹمنٹ رینج 1: 8 میں کی جاتی ہے، جو زیادہ تر معاملات میں بڑے پیمانے پر ٹونٹی کے لیے کافی ہوتی ہے۔
الیکٹرک موٹر کے خود پر جوش کی شرط یہ ہے:
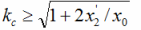
جہاں x '2- روٹر سمیٹنے والی آمادہ مزاحمت، اوہم؛ хо- میگنیٹائزنگ سرکٹ کی دلکش مزاحمت۔ اوم
جہاں ks - اسکیم کا گتانک
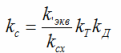
kd — روٹر کرنٹ کی اسٹیٹر کرنٹ میں کمی کا گتانک؛ kcx — اصلاحی سرکٹ گتانک، تین فیز برج سرکٹ کے لیے kx = 0.85؛ kt موٹر کا اسٹیٹر سے روٹر تک ٹرانسفارمیشن گتانک ہے۔
گتانک kd اسٹیٹر وائنڈنگز کی کنکشن اسکیم پر منحصر ہے، جو 380 V کے مین وولٹیج پر گھریلو ٹونٹی کی موٹروں میں ستارے سے جڑے ہوئے ہیں۔
گتانک kt تبدیلی کے گتانک پر منحصر ہے، یعنی اسٹیٹر وولٹیج اور روٹر وولٹیج کے تناسب کا، جو موٹر کی قسم پر منحصر ہے۔ مثال کے طور پر، MT اور 4MT سیریز کی کئی الیکٹرک موٹرز کے لیے، قدر اور متعلقہ پیرامیٹرز کو ٹیبلیٹ کیا گیا ہے۔ 1۔
جدول 1۔
الیکٹرک موٹر ٹائپ پاور، kWt روٹر وولٹیج، V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.31310MT 512-6 55 340 1.11 0.98 0.197 3.8 1.05 4MTN280L10 75 308 1.23 1.06 0.146 2.33 1.06 4MTN280M6 110 420 0. 9 0.7 0.083 2.981
حالت кс ≥ √(1 + 2х '2/хо) MTN412-6, 4MTN225L6 قسم کے انجنوں کے لیے کی جاتی ہے، جسے "پرجوش" کہا جا سکتا ہے۔ اس طرح کی الیکٹرک موٹریں سرکٹ کے اضافی فیصلے کیے بغیر سیلف ایکسائٹیشن موڈ میں داخل ہوتی ہیں۔ تاہم، کم وولٹیج کے مکمل آلات (کم وولٹیج سوئچ گیئر یا کنٹرول پینلز) میں ایسی موٹروں کے ساتھ مل کر کام کرنے کے لیے ڈیزائن کیا گیا ہے، قابل اعتماد آپریشن کے لیے ایک چھوٹا ابتدائی جوش فراہم کیا جاتا ہے۔
ابتدائی جوش ایک مستقل، نام نہاد گزر کر کیا جاتا ہے۔ نصف لہر ریکٹیفائر سے "سپلائی کرنٹ" کی ایک چھوٹی قدر (عام طور پر موٹر کے ریٹیڈ کرنٹ کا 10% سے زیادہ نہیں)۔ پرجوش موٹرز کے لیے، کسی بھی صورت میں، یہ خود پرجوش متحرک بریک موڈ میں قابل اعتماد منتقلی کے لیے کافی ہے۔
الیکٹرک موٹرز MTN512-6, 4MTN280M6، جن کے لیے شرط кс ≥ √(1 + 2х '2/хо) مطمئن نہیں ہے، "غیر پرجوش" ہیں۔ اس کا مطلب یہ نہیں ہے کہ ایسی موٹریں خود جوش کے ساتھ متحرک بریک موڈ میں کام نہیں کرسکتی ہیں، لیکن ان کے لیے درکار اضافی کرنٹ کی قدر اسٹیٹر کے ریٹیڈ کرنٹ کے 50% تک پہنچ جاتی ہے۔یہ غیر پرجوش الیکٹرک موٹروں کے لیے خصوصی NKU (کنٹرول پینل) کے استعمال کی ضرورت ہے۔ …
الیکٹرک موٹر کی قسم 4MTN280L10 کے ساتھ кс = √(1 + 2х '2/хо) خود جوش کی حد پر ہے اور پیرامیٹرز میں کوئی بھی بے ترتیب تبدیلی خود جوش کی حالت کی خلاف ورزی کر سکتی ہے۔ لہذا، اس طرح کی موٹر کو غیر حوصلہ افزائی کے طور پر بھی درجہ بندی کیا جا سکتا ہے.
الیکٹرک موٹر کی خود کشی کرنے کی صلاحیت کو متاثر کرنے والے اہم پیرامیٹرز روٹر E2nom کا درجہ بند وولٹیج ہے۔ E2nom کی اہم قدر، جس پر خود کشی بڑے سپلائی کرنٹ کے بغیر نہیں ہوتی، کو 300 V کے طور پر لیا جانا چاہیے۔
1980 کی دہائی کے اوائل میں 4MT کرین الیکٹرک موٹرز کی ایک سیریز تیار کرتے وقت Dynamo پلانٹ اور Sibelektromotor PO نے خود پرجوش متحرک بریک موڈ کی اس خصوصیت کو مدنظر رکھا۔
خاص طور پر، کچھ الیکٹرک موٹروں کے لیے E2nom ویلیو کو پچھلی MT سیریز کے مقابلے میں کم کر دیا گیا ہے تاکہ موٹرز کو پرجوش بنایا جا سکے۔
مثال کے طور پر، 4MTN225L6 الیکٹرک موٹر کے لیے، جو بڑے پیمانے پر ٹاور کرینز کی الیکٹرک ڈرائیو میں استعمال ہوتی ہے، E2nom کو پچھلی MTN512-6 سیریز والی موٹر کے مقابلے میں 340 سے 290 V تک کم کر دیا گیا، جس نے موٹر کو خود پر جوش بنایا۔ بعد میں، OJSC "Sibelectromotor" نے اسی پیرامیٹرز کے ساتھ الیکٹرک موٹر 4MTM225L6 کی پیداوار شروع کی۔
وقت کے ساتھ، اسی طرح کے مقصد کے ساتھ الیکٹرک موٹرز دوسرے مینوفیکچررز کی طرف سے تیار کرنے لگے.
Rzhevsky کرین کنسٹرکشن پلانٹ MKAF225L6 الیکٹرک موٹر تیار کرتا ہے، سائبیرین الیکٹرو ٹیکنیکل کمپنی 4MTM225L6 PND الیکٹرک موٹر تیار کرتی ہے۔ہر ایک مینوفیکچررز کی تکنیکی صلاحیتوں سے متعلق پروٹوٹائپ سے مختلف ہونے کے باوجود، ان تمام الیکٹرک موٹرز کے برقی پیرامیٹرز اور تنصیب کے طول و عرض ایک جیسے ہیں اور مکمل طور پر قابل تبادلہ ہیں۔
انجنوں کے ناموں میں فرق صارف کو اپنی ترجیحات، قیمت، ترسیل کے وقت وغیرہ کے لحاظ سے ایک یا دوسرے مینوفیکچرر کا باخبر انتخاب کرنے کی اجازت دیتا ہے۔ اور ساتھ ہی اس بات کو بھی یقینی بنائیں کہ ایک ٹونٹی بنانے والے کی الیکٹرک موٹر کو دوسرے مینوفیکچرر کی الیکٹرک موٹر سے تبدیل کرنے سے ٹونٹی کی خرابی یا حادثہ پیش نہیں آئے گا۔
تاہم، پچھلی دہائی میں، مختلف مینوفیکچررز کی الیکٹرک موٹرز مقامی مارکیٹ میں نمودار ہوئی ہیں، جن کا برانڈ بالکل JSC "Sibelectromotor" کے ذریعہ تیار کردہ "اصل" الیکٹرک موٹر کے برانڈ کو دوبارہ تیار کرتا ہے۔ یہ فرض کیا جا سکتا ہے کہ برقی موٹروں کی اصل ہمارے ملک کے بڑے مشرقی پڑوسی سے جڑی ہوئی ہے۔ ان کی قیمت روایتی مینوفیکچررز کے مقابلے میں قدرے کم ہے، لہذا کاروباری اداروں کی سپلائی سے ان میں دلچسپی سمجھ میں آتی ہے۔
اس طرح، تیار شدہ کرین پر نصب کرنے کے لیے الیکٹرک موٹر کا آرڈر دے کر یا کرین پر خراب الیکٹرک موٹر کو کام کرنے والی موٹر سے بدل کر، آپ کسی نامعلوم مینوفیکچرر کی الیکٹرک موٹر حاصل کر سکتے ہیں، جس کی E2nom پروٹوٹائپ الیکٹرک موٹر سے مختلف ہے۔
یہ صورت حال کسی حد تک 90 کی دہائی کے اوائل کی یاد دلا دیتی ہے، جب ایک ہی وقت میں ایک ہی نام کے کئی پاپ گروپس نے ملک کا دورہ کیا۔
ہم ایک بار پھر یاد کرتے ہیں کہ E2nom/I2nom کا تناسب زخم روٹر والی موٹر کا سب سے اہم پیرامیٹر ہے، جو سٹارٹنگ ریزسٹرس، ریلے کنٹیکٹر کے آلات کے انتخاب کو متاثر کرتا ہے اور جیسا کہ اوپر بتایا گیا ہے، خود جوش کی حالت پر۔ برقی موٹر.
تاہم، اکثر، کلون انجنوں کے نام کی تختیوں پر روٹر کا کوئی ڈیٹا نہیں ہوتا ہے۔ یہاں ایک مثال ہے:
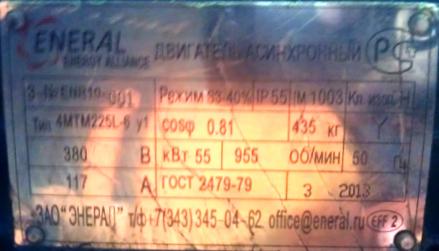
چاول۔ 3. روٹر کرین غیر مطابقت پذیر موٹر نام پلیٹ
ویسے، اس الیکٹرک موٹر کی "درست" قدر E2nom تھی، اب اسے تجرباتی طور پر طے کرنا تھا۔
4MTM225L6 الیکٹرک موٹر کے لیے دیگر مینوفیکچررز کے کیٹلاگ میں، قدر E2nom = 340 V کی نشاندہی کی گئی ہے، یعنی پرجوش موٹر ایک غیر پرجوش ہو گئی۔ خود جوش کے ساتھ متحرک بریک کے ساتھ الیکٹرک ڈرائیو کے حصے کے طور پر ایسی الیکٹرک موٹر استعمال کرنے کا نتیجہ روٹر اور اسٹیٹر وائنڈنگز کی مکینیکل تباہی کے ساتھ برقی موٹر کا بوجھ اور علیحدگی میں کمی ہے۔
یہ بالکل وہی تصویر ہے جس کا مصنف نے حال ہی میں ایک قدیم ترین روسی مشین بنانے والے اداروں میں مشاہدہ کیا، جہاں E2n = 340 V کے ساتھ 4MTM225L6 قسم کی کلون شدہ الیکٹرک موٹر کے ساتھ ایک نیا پل کرین پہنچایا گیا۔ شکار اس کے علاوہ، کرین کا مالک چکما دینے کے بعد انجن کو تین (!) بار بحال کرتا ہے۔
کلون الیکٹرک موٹروں کا ایک اور مینوفیکچرر، بظاہر بار بار اسی طرح کے حادثات کا سامنا کر رہا ہے، اب ایک ہی برانڈ (!) کے تحت دو الیکٹرک موٹریں تیار کرتا ہے۔ ایک E2nom = 340 V کے ساتھ، دوسرا E2nom = 264 V کے ساتھ کیٹلاگ میں ایک نوٹ کے ساتھ دیا گیا ہے: "ٹائپ KB ٹیپس کے لیے"، یعنی۔ ٹاور کرینیں.
اس طرح کی موٹر واقعی ٹاور کرینوں پر سب سے زیادہ استعمال ہوتی ہے، لیکن یہ پل کرینوں پر بھی نصب ہوتی ہے۔ لہذا آپ سپلائر اور گاہک کے درمیان مکالمہ سن سکتے ہیں: "آپ کو کس کرین کے لیے موٹر کی ضرورت ہے؟ فرش کے لیے۔ پھر اسے لے لو (E2nom = 340 V)۔ » اور برقی لہروں کی ڈرائیو میں خود پرجوش متحرک بریک کے ساتھ ایک کنٹرول پینل ہے۔ نتیجہ اوپر بیان کیا گیا ہے۔
ایک ہی وقت میں، کوئی یہ نہیں کہہ رہا ہے کہ یہ برقی موٹریں خراب یا ناقابل اعتبار ہیں اور کرینوں پر استعمال نہیں کی جا سکتیں۔ مارکیٹ میں جتنے زیادہ انتخاب ہوں گے، اتنا ہی بہتر ہے۔ جیسا کہ وہ کہتے ہیں، وہاں زیادہ اچھے اور مختلف انجن ہیں. یہ صرف اتنا ہے کہ ان کا برانڈ صارفین کو گمراہ کرتا ہے، جو خطرناک نتائج سے بھرپور ہو سکتا ہے۔
پروٹو ٹائپ کے علاوہ روٹر پیرامیٹرز کے ساتھ الیکٹرک موٹر استعمال کرنے کے لیے، آپ کو:
-
جب روٹر سرکٹ کھلا ہو اور سٹیٹر وائنڈنگ گرڈ سے منسلک ہو تو E2nom کی پیمائش کریں۔
-
E2nom پیمائش کی بنیاد پر، بیلسٹ ریزسٹرس کا حساب لگائیں، منتخب کریں اور آرڈر کریں۔
-
کیٹلاگ سے غیر جوش والی الیکٹرک موٹرز کے لیے ایک کنٹرول پینل کا انتخاب کریں اور اسے آرڈر کریں۔
یا آپ کسی انجن کو آرڈر کرنے سے پہلے E2nom کی قیمت کے بارے میں پوچھ سکتے ہیں جو اس کی قیمت کے ساتھ متوجہ ہو اور خاص طور پر معاہدے میں اس پر متفق ہو۔ تاہم، یہ آرڈر شدہ موٹر کے ان پٹ کنٹرول کے دوران E2nom کی پیمائش کو روکتا نہیں ہے۔
مندرجہ بالا کا خلاصہ کرتے ہوئے، ہم مندرجہ ذیل نتائج اخذ کر سکتے ہیں:
-
فیز روٹر الیکٹرک موٹرز پر مبنی گھریلو نل کی الیکٹرک ڈرائیو میں، خود پرجوش متحرک بریکنگ بڑے پیمانے پر استعمال ہوتی ہے۔ ایسی دسیوں ہزار الیکٹرک ڈرائیوز کام میں ہیں۔ وہ اب بھی جاری کیے جا رہے ہیں۔
-
خود پرجوش متحرک بریک موڈ میں کام کرنے کے لیے، الیکٹرک موٹر کا ایک مخصوص E2nom/I2nom تناسب ہونا ضروری ہے۔
-
زخم روٹر کے ساتھ الیکٹرک موٹر کے خود کو جوش دینے کی بنیادی شرط E2nom ≤ 300 V کی قدر ہے۔
-
پرجوش الیکٹرک موٹرز کے لیے ڈیزائن کیے گئے کنٹرول پینلز کے ساتھ E2nom> 300 V والی الیکٹرک موٹرز کا استعمال لوڈ کو گرنے اور الیکٹرک موٹر کو تباہ کرنے کا سبب بن سکتا ہے۔