آپریشن کا اصول اور الیکٹرک موٹر کا آلہ
کسی بھی الیکٹرک موٹر کو مکینیکل کام کرنے کے لیے ڈیزائن کیا جاتا ہے کیونکہ اس پر لگائی جانے والی بجلی کی کھپت عام طور پر روٹری موشن میں تبدیل ہوتی ہے۔ اگرچہ ٹکنالوجی میں ایسے ماڈل موجود ہیں جو فوری طور پر کام کرنے والے جسم کی ترجمانی تحریک پیدا کرتے ہیں۔ یہ لکیری موٹرز کہلاتی ہیں۔
صنعتی تنصیبات میں، الیکٹرک موٹرز مختلف دھاتی کاٹنے والی مشینیں اور تکنیکی پیداوار کے عمل میں شامل مکینیکل آلات چلاتی ہیں۔
گھریلو آلات کے اندر، الیکٹرک موٹریں واشنگ مشینیں، ویکیوم کلینر، کمپیوٹر، ہیئر ڈرائر، بچوں کے کھلونے، گھڑیاں اور بہت سے دوسرے آلات چلاتی ہیں۔

بنیادی جسمانی عمل اور عمل کے اصول
جب اندر منتقل ہوتا ہے۔ مقناطیسی میدان برقی چارجز، جنہیں الیکٹرک کرنٹ کہا جاتا ہے، میں ہمیشہ ایک مکینیکل قوت ہوتی ہے جو مقناطیسی فیلڈ لائنوں کی سمت کے لیے کھڑے ہوائی جہاز میں اپنی سمت کو موڑنے کا رجحان رکھتی ہے۔جب کوئی برقی رو دھاتی تار یا اس سے بنی کوائل سے گزرتا ہے، تو یہ قوت کرنٹ لے جانے والے ہر تار اور مجموعی طور پر پوری کنڈلی کو حرکت/گھماتی ہے۔
نیچے دی گئی تصویر ایک دھاتی فریم کو دکھاتی ہے جس میں کرنٹ بہتا ہے۔ اس پر لاگو مقناطیسی میدان فریم کی ہر شاخ کے لیے ایک قوت F پیدا کرتا ہے، جو ایک گردشی حرکت پیدا کرتا ہے۔

برقی اور مقناطیسی توانائی کے تعامل کی یہ خاصیت، ایک بند کنڈکٹنگ لوپ میں الیکٹرو موٹیو فورس کی تخلیق پر مبنی ہے، ہر برقی موٹر پر کام کرتی ہے۔ اس کے ڈیزائن میں شامل ہیں:
-
ایک کنڈلی جس کے ذریعے برقی کرنٹ بہتا ہے۔ یہ ایک خاص اینکر کور پر رکھا جاتا ہے اور رگڑ قوتوں کے خلاف مزاحمت کو کم کرنے کے لیے روٹری بیرنگ میں فکس کیا جاتا ہے۔ اس ڈیزائن کو روٹر کہا جاتا ہے۔
-
اسٹیٹر، جو ایک مقناطیسی میدان بناتا ہے، جو اپنی طاقت کی لکیروں کے ساتھ روٹر وائنڈنگ کے موڑ کے ساتھ گزرتے ہوئے برقی چارجز کو گھستا ہے۔
-
اسٹیٹر لگانے کے لیے رہائش۔ جسم کے اندر، خصوصی نشستیں بنائی جاتی ہیں، جن کے اندر روٹر بیرنگ کے بیرونی پنجرے نصب ہوتے ہیں۔
آسان ترین الیکٹرک موٹر کے سادہ ڈیزائن کو درج ذیل شکل کی تصویر سے ظاہر کیا جا سکتا ہے۔

جب روٹر گھومتا ہے، تو ایک ٹارک پیدا ہوتا ہے، جس کی طاقت کا انحصار ڈیوائس کے عمومی ڈیزائن، لاگو برقی توانائی کی مقدار اور تبادلوں کے دوران اس کے نقصانات پر ہوتا ہے۔
موٹر کی زیادہ سے زیادہ ممکنہ ٹارک پاور کی شدت ہمیشہ اس پر لگائی جانے والی برقی توانائی سے کم ہوتی ہے۔ یہ کارکردگی کی قیمت کی طرف سے خصوصیات ہے.
الیکٹرک موٹرز کی اقسام
کنڈلیوں سے بہنے والے کرنٹ کی قسم کے مطابق انہیں ڈی سی یا اے سی موٹرز میں تقسیم کیا گیا ہے۔ان دو گروہوں میں سے ہر ایک میں مختلف تکنیکی عملوں کا استعمال کرتے ہوئے بڑی تعداد میں ترمیم ہوتی ہے۔
ڈی سی موٹرز
ان کے پاس ایک سٹیٹر مقناطیسی فیلڈ ہے جو ایک سٹیشنری فکسڈ کے ذریعہ بنایا گیا ہے۔ مستقل میگنےٹ یا اتیجیت کنڈلی کے ساتھ خصوصی برقی مقناطیس۔ آرمیچر کوائل مضبوطی سے شافٹ میں نصب کیا جاتا ہے، جو بیرنگ میں طے ہوتا ہے اور اپنے محور کے گرد آزادانہ طور پر گھوم سکتا ہے۔
اس طرح کے انجن کا بنیادی ڈھانچہ تصویر میں دکھایا گیا ہے۔

فرومیگنیٹک مواد سے بنے آرمیچر کے کور پر، دو سیریز سے منسلک حصوں پر مشتمل ایک کوائل ہوتا ہے، جو ایک سرے پر کنڈکٹنگ کلیکٹر پلیٹوں سے جڑے ہوتے ہیں اور دوسرے سرے پر ایک دوسرے سے جڑے ہوتے ہیں۔ دو گریفائٹ برش آرمچر کے متضاد طور پر مخالف سروں پر واقع ہیں اور کلکٹر پلیٹوں کے رابطہ پیڈ کے خلاف دبائے جاتے ہیں۔
نچلے پیٹرن کے برش پر ایک مثبت ڈی سی سورس پوٹینشل اور اوپر والے پر منفی پوٹینشل کا اطلاق ہوتا ہے۔ کنڈلی کے ذریعے بہنے والے کرنٹ کی سمت ڈیش والے سرخ تیر سے دکھائی دیتی ہے۔
کرنٹ کی وجہ سے مقناطیسی میدان میں آرمیچر کے نچلے بائیں طرف شمالی قطب اور آرمیچر کے اوپری دائیں طرف ایک جنوبی قطب ہوتا ہے (جمبل اصول)۔ اس کے نتیجے میں روٹر کے کھمبے اسی نام کے ساکن سے پیچھے ہٹتے ہیں اور سٹیٹر کے مخالف کھمبوں کی طرف کشش پیدا کرتے ہیں۔ لاگو قوت کے نتیجے میں، ایک گردشی حرکت ہوتی ہے، جس کی سمت بھورے تیر سے ظاہر ہوتی ہے۔
جڑواں کے ذریعہ آرمیچر کی مزید گردش کے ساتھ، کھمبے دوسرے کلکٹر پلیٹوں میں منتقل ہوجاتے ہیں۔ ان میں کرنٹ کی سمت الٹ جاتی ہے۔ روٹر مزید گھومتا رہتا ہے۔
اس طرح کے کلیکٹر ڈیوائس کا سادہ ڈیزائن برقی توانائی کے بڑے نقصانات کا باعث بنتا ہے۔ایسی موٹریں سادہ ڈیزائن کے آلات یا بچوں کے کھلونوں میں کام کرتی ہیں۔
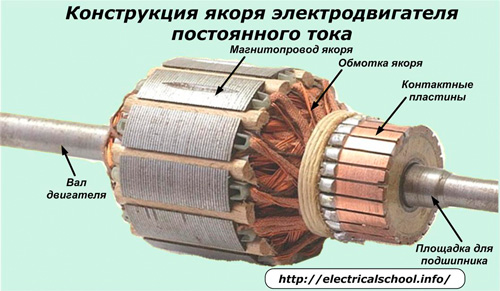
پیداوار کے عمل میں شامل براہ راست موجودہ الیکٹرک موٹروں کا ڈیزائن زیادہ پیچیدہ ہے:
-
کنڈلی کو دو حصوں میں نہیں بلکہ کئی حصوں میں تقسیم کیا گیا ہے۔
-
کنڈلی کے ہر حصے کو اس کے اپنے کھمبے پر نصب کیا جاتا ہے؛
-
کلیکٹر ڈیوائس کو وائنڈنگز کی تعداد کے مطابق ایک مخصوص تعداد میں رابطہ پیڈ کے ساتھ بنایا جاتا ہے۔
نتیجے کے طور پر، برش اور موجودہ ذریعہ سے رابطہ پلیٹوں کے ذریعہ ہر قطب کا ایک ہموار کنکشن پیدا ہوتا ہے اور توانائی کے نقصانات کو کم کیا جاتا ہے.
اس طرح کے اینکر کا آلہ تصویر میں دکھایا گیا ہے۔
ڈی سی موٹرز میں، روٹر کی گردش کی سمت کو تبدیل کیا جا سکتا ہے. ایسا کرنے کے لیے، یہ کافی ہے کہ کنڈلی میں کرنٹ کی حرکت کو منبع پر قطبیت کو تبدیل کرکے اس کے برعکس تبدیل کیا جائے۔
اے سی موٹرز
وہ پچھلے ڈیزائنوں سے اس لحاظ سے مختلف ہیں کہ ان کے کنڈلی میں بہنے والے برقی رو کو بذریعہ بیان کیا گیا ہے۔ سائنوسائیڈل ہارمونک قانونوقتا فوقتا اس کی سمت (نشان) کو تبدیل کرنا۔ ان کو طاقت دینے کے لیے جنریٹرز سے متبادل اشارے کے ساتھ وولٹیج فراہم کی جاتی ہے۔
ایسی موٹروں کا سٹیٹر مقناطیسی سرکٹ کے ذریعہ انجام دیا جاتا ہے۔ یہ نالیوں کے ساتھ فیرو میگنیٹک پلیٹوں سے بنا ہے جس میں کنڈلی کے موڑ کو ایک فریم (کوائل) کنفیگریشن کے ساتھ رکھا جاتا ہے۔

ہم وقت ساز الیکٹرک موٹرز
نیچے دی گئی تصویر روٹر اور سٹیٹر کے برقی مقناطیسی شعبوں کی ہم وقت ساز گردش کے ساتھ سنگل فیز AC موٹر کے آپریشن کے اصول کو ظاہر کرتی ہے۔

متضاد طور پر مخالف سروں پر سٹیٹر کے مقناطیسی سرکٹ کے نالیوں میں، سمیٹنے والی تاریں رکھی جاتی ہیں، جو اسکیمیٹک طور پر ایک فریم کی شکل میں دکھائی دیتی ہیں جس کے ذریعے ایک متبادل کرنٹ بہتا ہے۔
آئیے اس لمحے کے معاملے پر غور کریں جو اس کی نصف لہر کے مثبت حصے کے گزرنے سے مطابقت رکھتا ہے۔
بیئرنگ سیلز میں، بلٹ ان مستقل مقناطیس کے ساتھ ایک روٹر آزادانہ طور پر گھومتا ہے، جس میں قطب کا شمالی «N منہ» اور جنوبی «S منہ» واضح طور پر بیان کیا گیا ہے۔ جب کرنٹ کی مثبت آدھی لہر سٹیٹر وائنڈنگ سے گزرتی ہے، تو اس میں قطبین «S st» اور «N st» کے ساتھ ایک مقناطیسی میدان بنتا ہے۔
روٹر اور اسٹیٹر کے مقناطیسی شعبوں کے درمیان تعامل کی قوتیں پیدا ہوتی ہیں (کھمبوں کو پیچھے ہٹانے کے ساتھ اور کھمبے کو اپنی طرف متوجہ کرنے کے برعکس) جو موٹر آرمچر کو کسی بھی پوزیشن سے انتہائی حد تک موڑ دیتے ہیں جب مخالف قطب ایک دوسرے کے ممکنہ حد تک قریب واقع ہوتے ہیں۔ ایک اور
اگر ہم اسی معاملے پر غور کریں، لیکن اس لمحے کے لیے جب اس کے برعکس - کرنٹ کی منفی آدھی لہر فریم کے تار سے گزرتی ہے، تو آرمچر کی گردش مخالف سمت میں واقع ہوگی۔
اسٹیٹر میں روٹر کی مسلسل حرکت کو یقینی بنانے کے لیے، ایک وائنڈنگ فریم نہیں بنایا جاتا، بلکہ ان میں سے ایک مخصوص تعداد، اس لیے کہ ان میں سے ہر ایک الگ کرنٹ سورس سے چلتا ہے۔
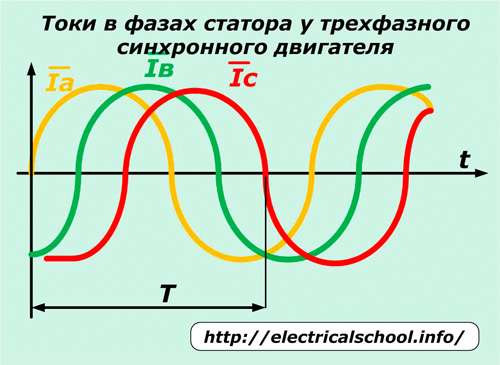
سنکرونس گردش کے ساتھ تھری فیز اے سی موٹر کا عملی اصول، روٹر اور سٹیٹر کے برقی مقناطیسی فیلڈز کو مندرجہ ذیل تصویر میں دکھایا گیا ہے۔

اس ڈیزائن میں، سٹیٹر میگنیٹک سرکٹ کے اندر تین کنڈلی A، B اور C لگائی گئی ہیں، جو ایک دوسرے سے 120 ڈگری کے زاویوں سے آف سیٹ ہیں۔ کنڈلی A کو پیلے رنگ سے نشان زد کیا گیا ہے، B سبز ہے، اور C سرخ ہے۔ ہر کنڈلی پچھلے کیس کی طرح اسی فریموں کے ساتھ بنائی گئی ہے۔
تصویر میں، کسی بھی صورت میں، کرنٹ آگے یا ریورس سمت میں صرف ایک کنڈلی کے ذریعے بہتا ہے، جس کی نشاندہی «+» اور «-« کی علامتوں سے ہوتی ہے۔
جب مثبت نصف لہر آگے کی سمت میں فیز A سے گزرتی ہے، تو روٹر فیلڈ کا محور ایک افقی پوزیشن لیتا ہے، کیونکہ سٹیٹر کے مقناطیسی قطب اس جہاز میں بنتے ہیں اور حرکت پذیر آرمچر کو اپنی طرف متوجہ کرتے ہیں۔ روٹر کے مخالف کھمبے سٹیٹر کے کھمبے کے قریب آتے ہیں۔
جب مثبت نصف لہر مرحلے C میں جاتی ہے، تو آرمچر 60 ڈگری گھڑی کی سمت گھمائے گا۔ ایک بار فیز B پر کرنٹ لگنے کے بعد، اسی طرح کی آرمچر گردش واقع ہوگی۔ اگلی وائنڈنگ کے اگلے مرحلے میں ہر ایک کرنٹ بہاؤ روٹر کو موڑ دے گا۔
اگر 120 ڈگری کے زاویہ سے منتقل ہونے والا تھری فیز مینز وولٹیج ہر ایک وائنڈنگ پر لاگو ہوتا ہے، تو ان میں متبادل کرنٹ گردش کرے گا، جو آرمچر کو گھمائے گا اور لاگو برقی مقناطیسی فیلڈ کے ساتھ اس کی ہم وقت ساز گردش پیدا کرے گا۔
تین فیز سٹیپر موٹر میں وہی مکینیکل ڈیزائن کامیابی کے ساتھ استعمال ہوتا ہے… صرف کنٹرول کے ذریعے ہر سمیٹ میں خصوصی کنٹرولر (سٹیپر موٹر ڈرائیور) اوپر بیان کردہ الگورتھم کے مطابق مستقل دالیں لگائی جاتی ہیں اور ہٹا دی جاتی ہیں۔
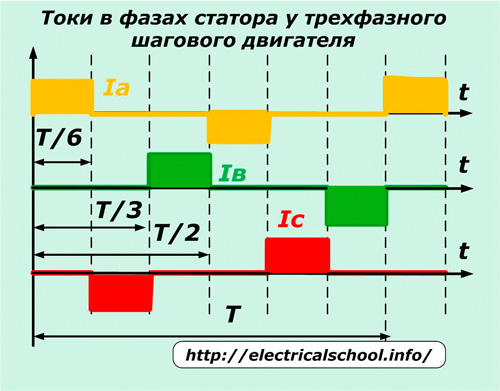
ان کا آغاز ایک گردشی حرکت کا آغاز کرتا ہے، اور وقت کے ایک خاص مقام پر ان کا خاتمہ شافٹ کی ایک پیمائش شدہ گردش اور مخصوص تکنیکی کارروائیوں کو انجام دینے کے لیے ایک پروگرام شدہ زاویہ پر رکنا فراہم کرتا ہے۔
بیان کردہ دونوں تین مرحلے کے نظاموں میں، آرمچر کی گردش کی سمت کو تبدیل کرنا ممکن ہے۔ ایسا کرنے کے لیے، آپ کو صرف مراحل کی ترتیب کو تبدیل کرنے کی ضرورت ہے «A» — «B» — «C» کو دوسرے میں، مثال کے طور پر «A» — «C» — «B»۔
روٹر کی رفتار کو مدت T کی طوالت سے کنٹرول کیا جاتا ہے۔ اس کی کمی گردش کی سرعت کا باعث بنتی ہے۔مرحلے میں کرنٹ کے طول و عرض کی وسعت کا انحصار وائنڈنگ کی اندرونی مزاحمت اور اس پر لگائی جانے والی وولٹیج کی قدر پر ہوتا ہے۔ یہ برقی موٹر کی ٹارک اور طاقت کی مقدار کا تعین کرتا ہے۔
غیر مطابقت پذیر موٹرز
ان موٹر ڈیزائنوں میں وائنڈنگز کے ساتھ وہی سٹیٹر مقناطیسی سرکٹ ہے جیسا کہ پہلے زیر بحث سنگل فیز اور تھری فیز ماڈلز میں ہے۔ ان کا نام آرمیچر اور اسٹیٹر برقی مقناطیسی شعبوں کی غیر مطابقت پذیر گردش سے حاصل ہوتا ہے۔ یہ روٹر کی ترتیب کو بہتر بنا کر کیا جاتا ہے۔
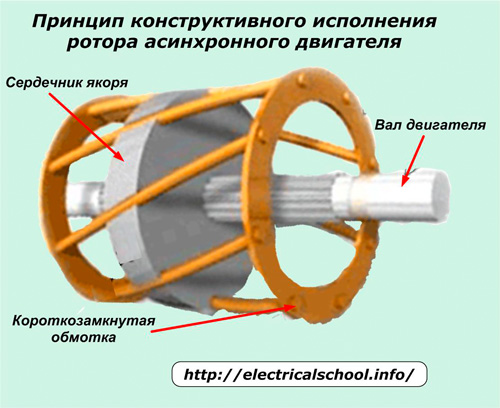
اس کا کور نالیوں والی برقی اسٹیل پلیٹوں سے بنا ہے۔ وہ ایلومینیم یا تانبے کے کرنٹ کنڈکٹرز سے لیس ہوتے ہیں، جو آرمچر کے سروں پر کنڈکٹو رِنگز کے ساتھ بند ہوتے ہیں۔
جب اسٹیٹر وائنڈنگز پر وولٹیج کا اطلاق ہوتا ہے، تو الیکٹرو موٹیو فورس کے ذریعے روٹر وائنڈنگ میں ایک برقی کرنٹ ڈالا جاتا ہے اور ایک آرمچر مقناطیسی میدان پیدا ہوتا ہے۔ جب یہ برقی مقناطیسی میدان آپس میں تعامل کرتے ہیں تو موٹر شافٹ گھومنا شروع کر دیتا ہے۔
اس ڈیزائن کے ساتھ، روٹر کی حرکت اسٹیٹر میں گھومنے والی برقی مقناطیسی فیلڈ کے ہونے کے بعد ہی ممکن ہے، اور یہ اس کے ساتھ کام کے ایک متضاد موڈ میں جاری رہتا ہے۔
غیر مطابقت پذیر موٹرز ڈیزائن میں آسان ہیں۔ اس لیے یہ سستی ہیں اور بڑے پیمانے پر صنعتی تنصیبات اور گھریلو آلات میں استعمال ہوتی ہیں۔

ABB دھماکہ پروف الیکٹرک موٹر
لکیری موٹرز
صنعتی میکانزم کے بہت سے کام کرنے والے ادارے ایک ہوائی جہاز میں باہمی یا ترجمہی حرکت کرتے ہیں، جو کہ دھاتی کام کرنے والی مشینوں، گاڑیوں، ہتھوڑے کے ڈھیروں کو چلاتے وقت چلانے کے لیے ضروری ہے...
روٹری الیکٹرک موٹر سے گیئر باکسز، بال سکرو، بیلٹ ڈرائیوز اور اسی طرح کے مکینیکل آلات کے ذریعے اس طرح کے کام کرنے والے جسم کو منتقل کرنا ڈیزائن کو پیچیدہ بنا دیتا ہے۔ اس مسئلے کا جدید تکنیکی حل لکیری الیکٹرک موٹر کا آپریشن ہے۔
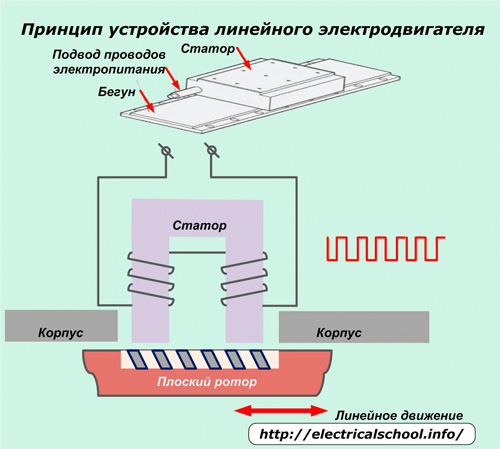
اس کا سٹیٹر اور روٹر روٹری الیکٹرک موٹرز کی طرح انگوٹھیوں میں زخم بننے کے بجائے سٹرپس کی شکل میں لمبا ہوتا ہے۔
آپریشن کا اصول ایک مخصوص لمبائی کے کھلے مقناطیسی سرکٹ کے ساتھ اسٹیشنری سٹیٹر سے برقی مقناطیسی توانائی کی منتقلی کی وجہ سے رنر روٹر کو دو طرفہ لکیری حرکت فراہم کرنا ہے۔ اس کے اندر ایک کام کرنے والا مقناطیسی میدان ترتیب وار کرنٹ کو آن کر کے بنایا جاتا ہے۔
یہ کلیکٹر کے ساتھ آرمچر سمیٹنے پر کام کرتا ہے۔ اس طرح کی موٹر میں پیدا ہونے والی قوتیں روٹر کو صرف گائیڈ عناصر کے ساتھ لکیری سمت میں منتقل کرتی ہیں۔
لکیری موٹرز کو براہ راست کرنٹ یا متبادل کرنٹ پر کام کرنے کے لیے ڈیزائن کیا گیا ہے اور یہ سنکرونس یا غیر مطابقت پذیر موڈ میں کام کر سکتی ہیں۔
لکیری موٹرز کے نقصانات یہ ہیں:
-
ٹیکنالوجی کی پیچیدگی؛
-
اعلی قیمت؛
-
کم توانائی کی کارکردگی.