تعدد کے ساتھ پمپ یونٹوں کی الیکٹرک ڈرائیو
 سینٹری فیوگل پمپ کے آپریٹنگ موڈز اپنے پہیوں کی گردش کی رفتار کو تبدیل کرکے ایڈجسٹ کرنے کے لیے سب سے زیادہ توانائی کے موثر ہوتے ہیں۔ پہیوں کی گردش کی رفتار کو تبدیل کیا جاسکتا ہے اگر ایک ایڈجسٹ الیکٹرک ڈرائیو کو ڈرائیو موٹر کے طور پر استعمال کیا جائے۔
سینٹری فیوگل پمپ کے آپریٹنگ موڈز اپنے پہیوں کی گردش کی رفتار کو تبدیل کرکے ایڈجسٹ کرنے کے لیے سب سے زیادہ توانائی کے موثر ہوتے ہیں۔ پہیوں کی گردش کی رفتار کو تبدیل کیا جاسکتا ہے اگر ایک ایڈجسٹ الیکٹرک ڈرائیو کو ڈرائیو موٹر کے طور پر استعمال کیا جائے۔
گیس ٹربائنز اور اندرونی دہن کے انجنوں کا ڈیزائن اور خصوصیات ایسی ہیں کہ وہ مطلوبہ حد کے اندر گردش کی رفتار میں تبدیلی فراہم کر سکتے ہیں۔
ہر میکانزم کی گردش کی رفتار کو ایڈجسٹ کرنے کے عمل کا آلہ کی مکینیکل خصوصیات کا استعمال کرتے ہوئے آسانی سے تجزیہ کیا جاتا ہے۔
پمپ اور الیکٹرک موٹر پر مشتمل ایک پمپنگ یونٹ کی مکینیکل خصوصیات پر غور کریں۔ انجیر میں۔ 1 ایک چیک والو (وکر 1) سے لیس ایک سینٹری فیوگل پمپ کی میکانکی خصوصیات اور گلہری-کیج روٹر (وکر 2) کے ساتھ ایک برقی موٹر دکھاتا ہے۔
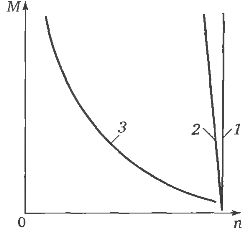
چاول۔ 1. پمپنگ یونٹ کی مکینیکل خصوصیات
الیکٹرک موٹر کی ٹارک ویلیوز اور پمپ کے مزاحمتی ٹارک کے درمیان فرق کو ڈائنامک ٹارک کہا جاتا ہے۔اگر موٹر کا ٹارک پمپ کی مزاحمت کے لمحے سے زیادہ ہے تو، متحرک ٹارک کو مثبت سمجھا جاتا ہے، اگر یہ کم ہے، تو یہ منفی ہے۔
ایک مثبت متحرک لمحے کے زیر اثر، پمپ یونٹ سرعت کے ساتھ کام کرنا شروع کرتا ہے، یعنی تیز کرتا ہے. اگر متحرک ٹارک منفی ہے، تو پمپ یونٹ تاخیر کے ساتھ کام کرتا ہے، یعنی سست ہو جاتا ہے.
جب یہ لمحات برابر ہوتے ہیں تو آپریشن کا ایک ساکن موڈ ہوتا ہے، یعنی پمپ یونٹ ایک مستقل رفتار سے کام کرتا ہے۔ اس رفتار اور متعلقہ ٹارک کا تعین الیکٹرک موٹر اور پمپ کی مکینیکل خصوصیات کے ملاپ سے ہوتا ہے (تصویر 1 میں پوائنٹ اے)۔
اگر کسی نہ کسی طریقے سے ایڈجسٹمنٹ کے عمل میں مکینیکل خصوصیت میں تبدیلی آتی ہے، مثال کے طور پر، الیکٹرک موٹر کے روٹر سرکٹ میں ایک اضافی ریزسٹر متعارف کروا کر نرم ہونا (تصویر 1 میں وکر 3)، الیکٹرک موٹر کا ٹارک مزاحمت کے لمحے سے چھوٹا ہو جائے گا.
منفی متحرک ٹارک کے زیر اثر، پمپ یونٹ تاخیر کے ساتھ کام کرنا شروع کرتا ہے، یعنی اس وقت تک سست ہوجاتا ہے جب تک کہ ٹارک اور مزاحمتی لمحے کا توازن دوبارہ نہ ہوجائے (تصویر 1 میں پوائنٹ بی)۔ یہ نقطہ رفتار اور ٹارک کی ایگن ویلیو سے مطابقت رکھتا ہے۔
اس طرح، پمپنگ یونٹ کی گردش کی رفتار کو کنٹرول کرنے کا عمل مسلسل الیکٹرک موٹر کے ٹارک میں تبدیلی اور پمپ کی مزاحمت کے لمحے کے ساتھ ہوتا ہے۔
پمپ کی رفتار کا کنٹرول یا تو الیکٹرک موٹر کی رفتار کو تبدیل کر کے کیا جا سکتا ہے، جو پمپ سے سختی سے جڑی ہوئی ہے، یا پمپ کو الیکٹرک موٹر سے جوڑنے والی ٹرانسمیشن کے گیئر ریشو کو تبدیل کر کے، جو مستقل رفتار سے چلتی ہے۔

برقی موٹروں کی گردش کی رفتار کا ضابطہ
AC موٹرز بنیادی طور پر پمپنگ یونٹس میں استعمال ہوتی ہیں۔ AC موٹر کی گردش کی رفتار سپلائی کرنٹ f کی فریکوئنسی، قطب کے جوڑوں کی تعداد p اور سلپ s پر منحصر ہے۔ ان میں سے ایک یا زیادہ پیرامیٹرز کو تبدیل کر کے، آپ الیکٹرک موٹر اور اس سے منسلک پمپ کی رفتار کو تبدیل کر سکتے ہیں۔
فریکوئنسی برقی ڈرائیو کا بنیادی عنصر ہے فریکوئنسی کنورٹر… انورٹر میں ایک مستقل گرڈ فریکوئنسی f1 ہے جو متغیر e2 میں تبدیل ہوتی ہے۔ تعدد e2 کے متناسب کنورٹر کے آؤٹ پٹ سے منسلک الیکٹرک موٹر کی رفتار کو تبدیل کرتا ہے۔
فریکوئنسی کنورٹر کے ساتھ، مینز وولٹیج U1 اور فریکوئنسی عملی طور پر F1 کو تبدیل نہیں کرتے ہیں جو کنٹرول سسٹم کے لیے ضروری متغیر پیرامیٹرز U2 اور e2 میں تبدیل ہوتے ہیں۔ الیکٹرک موٹر کے مستحکم آپریشن کو یقینی بنانے کے لیے، کرنٹ اور مقناطیسی بہاؤ کے لحاظ سے اس کے اوورلوڈ کو محدود کرنے کے لیے، فریکوئنسی کنورٹر میں اعلی توانائی کے اشارے کو برقرار رکھنے کے لیے، اس کے ان پٹ اور آؤٹ پٹ پیرامیٹرز کے درمیان ایک خاص تناسب کو برقرار رکھنا ضروری ہے مکینیکل پمپ کی خصوصیات یہ تعلقات تعدد کنٹرول قانون مساوات سے اخذ کیے گئے ہیں۔
پمپ کے لئے، تناسب کا مشاہدہ کیا جانا چاہئے:
U1 / f1 = U2 / f2 = const
انجیر میں۔ 2 فریکوئنسی ریگولیشن کے ساتھ انڈکشن موٹر کی مکینیکل خصوصیات کو ظاہر کرتا ہے۔جیسے جیسے فریکوئنسی f2 کم ہوتی ہے، مکینیکل خصوصیت نہ صرف n — M کوآرڈینیٹ میں اپنی پوزیشن تبدیل کرتی ہے، بلکہ کسی حد تک اپنی شکل بدلتی ہے۔ خاص طور پر، الیکٹرک موٹر کا زیادہ سے زیادہ ٹارک کم ہو جاتا ہے۔ یہ اس حقیقت کی وجہ سے ہے کہ U1 / f1 = U2 / f2 = const کے تناسب کے ساتھ اور تعدد f1 میں تبدیلی موٹر ٹارک کی شدت پر اسٹیٹر کی فعال مزاحمت کے اثر کو مدنظر نہیں رکھتی ہے۔

چاول۔ 2. زیادہ سے زیادہ (1) اور کم (2) تعدد پر فریکوئنسی الیکٹرک ڈرائیو کی مکینیکل خصوصیات
تعدد کو ایڈجسٹ کرتے وقت، اس اثر و رسوخ کو مدنظر رکھتے ہوئے، زیادہ سے زیادہ ٹارک میں کوئی تبدیلی نہیں ہوتی، مکینیکل خصوصیت کی شکل محفوظ رہتی ہے، صرف اس کی پوزیشن تبدیل ہوتی ہے۔
تعدد کنورٹرز کے ساتھ پلس چوڑائی ماڈیولیشن (PWM) اس حقیقت کی وجہ سے اعلی توانائی کی خصوصیات ہیں کہ کرنٹ اور وولٹیج کے منحنی خطوط کی شکل جو سائنوسائیڈل تک پہنچتی ہے کنورٹر کے آؤٹ پٹ پر فراہم کی جاتی ہے۔ حال ہی میں، آئی جی بی ٹی ماڈیولز پر مبنی فریکوئنسی کنورٹرز (انسولیٹڈ گیٹ بائی پولر ٹرانزسٹر) سب سے زیادہ پھیلے ہوئے ہیں۔
IGBT ماڈیول ایک اعلی کارکردگی کا کلیدی عنصر ہے۔ اس میں کم وولٹیج ڈراپ، تیز رفتار اور کم سوئچنگ پاور شامل ہے۔ غیر مطابقت پذیر موٹر کو کنٹرول کرنے کے لیے PWM اور ویکٹر الگورتھم کے ساتھ IGBT ماڈیولز پر مبنی فریکوئنسی کنورٹر کے دوسرے قسم کے کنورٹرز پر فائدے ہیں۔ اس میں پوری آؤٹ پٹ فریکوئنسی رینج پر ایک اعلی طاقت کا عنصر ہے۔
کنورٹر کا اسکیمیٹک خاکہ تصویر میں دکھایا گیا ہے۔ 3.
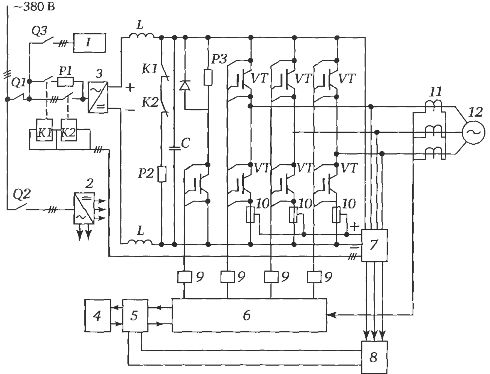
چاول۔ 3.آئی جی بی ٹی ماڈیولز کے فریکوئنسی کنورٹر کی اسکیم: 1 - پرستاروں کا بلاک؛ 2 - بجلی کی فراہمی؛ 3 - بے قابو ریکٹیفائر؛ 4 - کنٹرول پینل؛ 5 - کنٹرول پینل بورڈ؛ 6 — PWM؛ 7 - وولٹیج کنورژن یونٹ؛ 8 - سسٹم کنٹرول بورڈ؛ 9 - ڈرائیورز؛ 10 — انورٹر یونٹ کے لیے فیوز؛ 11 - موجودہ سینسر؛ 12 - غیر مطابقت پذیر گلہری-کیج موٹر؛ Q1, Q2, Q3 — پاور سرکٹ، کنٹرول سرکٹ اور فین یونٹ کے لیے سوئچز؛ K1, K2 - کیپسیٹرز اور پاور سرکٹ کو چارج کرنے کے لیے رابطہ کار؛ C - کیپسیٹر بینک؛ Rl, R2, R3 — کپیسیٹر چارج کے کرنٹ کو محدود کرنے کے لیے ریزسٹرس، کیپسیٹرز کے خارج ہونے والے مادہ اور ڈرین بلاک؛ VT - انورٹر پاور سوئچز (IGBT ماڈیولز)
فریکوئنسی کنورٹر کے آؤٹ پٹ پر، ایک وولٹیج (موجودہ) وکر بنتا ہے، جو سینوسائڈ سے تھوڑا مختلف ہوتا ہے، جس میں زیادہ ہارمونک اجزاء ہوتے ہیں۔ ان کی موجودگی الیکٹرک موٹر میں نقصانات میں اضافے کا باعث بنتی ہے۔ اس وجہ سے، جب الیکٹرک ڈرائیو ریٹیڈ اسپیڈ کے قریب رفتار سے چلتی ہے، تو الیکٹرک موٹر اوورلوڈ ہو جاتی ہے۔
کم رفتار پر کام کرنے پر، پمپ ڈرائیوز میں استعمال ہونے والی خود ہوا دار الیکٹرک موٹروں کے لیے ٹھنڈک کی حالت خراب ہو جاتی ہے۔ پمپنگ یونٹس کی نارمل کنٹرول رینج (1:2 یا 1:3) میں، وینٹیلیشن کے حالات کی اس خرابی کی تلافی بہاؤ کی شرح اور پمپ ہیڈ میں کمی کی وجہ سے بوجھ میں نمایاں کمی سے کی جاتی ہے۔
برائے نام قدر (50 ہرٹز) کے قریب تعدد پر کام کرتے وقت، اعلی ترتیب کے ہارمونکس کی ظاہری شکل کے ساتھ مل کر ٹھنڈک کے حالات کے بگڑنے کے لیے قابل اجازت میکانکی طاقت میں 8-15٪ کی کمی کی ضرورت ہوتی ہے۔اس کی وجہ سے، الیکٹرک موٹر کا زیادہ سے زیادہ ٹارک 1 — 2%، اس کی کارکردگی — 1 — 4%، cosφ — 5-7% تک کم ہو جاتا ہے۔
الیکٹرک موٹر کو زیادہ بوجھ سے بچنے کے لیے، یہ ضروری ہے کہ یا تو اس کی رفتار کی بالائی قدر کو محدود کیا جائے یا ڈرائیو کو زیادہ طاقتور الیکٹرک موٹر سے لیس کیا جائے۔ آخری پیمائش لازمی ہے جب پمپنگ یونٹ کو فریکوئنسی e2> 50 Hz پر کام کرنے کے لیے ڈیزائن کیا گیا ہو۔ انجن ریوولیشن کی اوپری قدر کو محدود کرنا فریکوئنسی e2 کو 48 ہرٹز تک محدود کرکے کیا جاتا ہے۔ ڈرائیو موٹر کی ریٹیڈ پاور میں اضافہ قریب ترین معیاری قدر تک مکمل کیا جاتا ہے۔

متغیر الیکٹرک بلاک ڈرائیوز کا گروپ کنٹرول
بہت سے پمپ سیٹ کئی بلاکس پر مشتمل ہوتے ہیں۔ ایک اصول کے طور پر، تمام یونٹس ایک سایڈست برقی ڈرائیو کے ساتھ لیس نہیں ہیں. دو یا تین نصب شدہ یونٹوں میں سے ایک کو ایڈجسٹ کرنے کے قابل الیکٹرک ڈرائیو سے لیس کرنا کافی ہے۔ اگر کنورٹر کسی ایک یونٹ سے مستقل طور پر جڑا ہوا ہے، تو ان کے موٹر وسائل کی غیر مساوی کھپت ہوتی ہے، کیونکہ متغیر رفتار ڈرائیو سے لیس یونٹ زیادہ دیر تک استعمال ہوتا ہے۔
اسٹیشن پر نصب تمام بلاکس کے درمیان بوجھ کی یکساں تقسیم کے لیے، گروپ کنٹرول اسٹیشن تیار کیے گئے ہیں، جن کی مدد سے بلاکس کو کنورٹر سے سیریز میں جوڑا جاسکتا ہے۔ کنٹرول سٹیشن عام طور پر کم وولٹیج یونٹس (380 V) کے لیے بنائے جاتے ہیں۔
عام طور پر، کم وولٹیج کنٹرول سٹیشنوں کو دو یا تین یونٹوں کو کنٹرول کرنے کے لیے ڈیزائن کیا گیا ہے۔کم وولٹیج کنٹرول اسٹیشنوں میں سرکٹ بریکر شامل ہیں جو فیز فیز شارٹ سرکٹ اور گراؤنڈنگ کے خلاف تحفظ فراہم کرتے ہیں، آلات کو اوورلوڈ سے بچانے کے لیے تھرمل ریلے، نیز کنٹرول کا سامان (سوئچز، بٹن پوسٹس اور دوسرے.).
کنٹرول سٹیشن کے سوئچنگ سرکٹ میں ضروری انٹرلاکس ہوتے ہیں جو فریکوئنسی کنورٹر کو کسی بھی منتخب بلاک سے منسلک کرنے اور پمپنگ یا بلیونگ یونٹ کے آپریشن کے تکنیکی موڈ کو پریشان کیے بغیر ورکنگ بلاکس کو تبدیل کرنے کی اجازت دیتے ہیں۔
کنٹرول سٹیشنز، ایک اصول کے طور پر، پاور عناصر (خودکار سوئچز، رابطہ کار، وغیرہ) کے ساتھ مل کر کنٹرول اور ریگولیٹ کرنے والے آلات (مائیکرو پروسیسر کنٹرولرز وغیرہ) پر مشتمل ہوتے ہیں۔
گاہک کی درخواست پر، اسٹیشنز بیک اپ پاور (ATS) کے خودکار سوئچ آن، استعمال شدہ بجلی کی تجارتی پیمائش، شٹ ڈاؤن آلات کو کنٹرول کرنے کے آلات سے لیس ہیں۔
اگر ضروری ہو تو، کنٹرول اسٹیشن میں اضافی آلات متعارف کرائے جاتے ہیں، جو یونٹس کے سافٹ اسٹارٹر کے فریکوئنسی کنورٹر کے ساتھ استعمال کو یقینی بناتے ہیں۔
خودکار کنٹرول اسٹیشن فراہم کرتے ہیں:
-
تکنیکی پیرامیٹر کی سیٹ ویلیو کو برقرار رکھنا (دباؤ، سطح، درجہ حرارت، وغیرہ)؛
-
ریگولیٹڈ اور نان ریگولیٹڈ یونٹس کی الیکٹرک موٹرز کے آپریٹنگ طریقوں کا کنٹرول (کھانے والے کرنٹ، پاور کا کنٹرول) اور ان کا تحفظ؛
-
مرکزی ڈیوائس کی ناکامی کی صورت میں بیک اپ ڈیوائس کا خودکار آغاز؛
-
فریکوئنسی کنورٹر کی ناکامی کی صورت میں بلاکس کو براہ راست نیٹ ورک میں تبدیل کرنا؛
-
بیک اپ (ATS) الیکٹریکل ان پٹ کا خودکار سوئچ آن؛
-
پاور سپلائی نیٹ ورک میں نقصان اور گہرے وولٹیج کے گرنے کے بعد اسٹیشن کا خودکار دوبارہ کنکشن (AR)؛
-
ایک مقررہ وقت پر کام کرنے والے یونٹوں کو روکنے اور شروع کرنے کے ساتھ اسٹیشن کے آپریشن موڈ میں خودکار تبدیلی؛
-
ایک اضافی غیر منظم یونٹ کو خودکار طور پر چالو کرنا اگر کنٹرول شدہ یونٹ، برائے نام رفتار تک پہنچ کر، ضروری پانی کی فراہمی فراہم نہیں کرتا ہے۔
-
موٹر وسائل کی یکساں کھپت کو یقینی بنانے کے لیے مخصوص وقفوں پر کام کے بلاکس کی خودکار تبدیلی؛
-
کنٹرول پینل یا کنٹرول پینل سے پمپنگ (اڑانے) یونٹ کے آپریشن موڈ کا آپریشنل کنٹرول۔
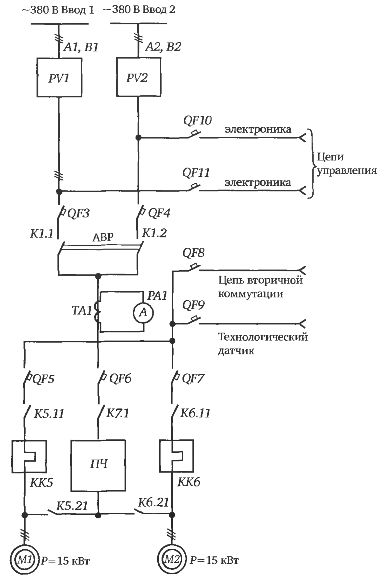
چاول۔ 4. متغیر فریکوئنسی پمپ کے الیکٹرک ڈرائیوز کے گروپ کنٹرول کے لیے اسٹیشن
پمپنگ یونٹس میں متغیر فریکوئنسی کے استعمال کی کارکردگی
متغیر فریکوئنسی ڈرائیو کا استعمال آپ کو توانائی کو نمایاں طور پر بچانے کی اجازت دیتا ہے، کیونکہ یہ کم بہاؤ کی شرح پر بڑے پمپنگ یونٹس کا استعمال ممکن بناتا ہے۔ اس کی بدولت، یونٹوں کی یونٹ کی صلاحیت میں اضافہ کرکے، ان کی کل تعداد کو کم کرنا اور اس کے مطابق، عمارتوں کے مجموعی طول و عرض کو کم کرنا، اسٹیشن کی ہائیڈرولک اسکیم کو آسان بنانا اور پائپ لائن کی تعداد کو کم کرنا ممکن ہے۔ والوز
اس طرح، پمپنگ یونٹس میں ایڈجسٹ الیکٹرک ڈرائیو کا استعمال بجلی اور پانی کی بچت کے ساتھ ساتھ، پمپنگ یونٹس کی تعداد کو کم کرنے، اسٹیشن کے ہائیڈرولک سرکٹ کو آسان بنانے اور پمپنگ اسٹیشن کی عمارت کی تعمیر کے حجم کو کم کرنے کی اجازت دیتا ہے۔اس سلسلے میں، ثانوی اقتصادی اثرات پیدا ہوتے ہیں: عمارت کی حرارت، روشنی اور مرمت کے اخراجات کم ہو جاتے ہیں، اسٹیشنوں کے مقصد اور دیگر مخصوص حالات کے لحاظ سے کم ہونے والے اخراجات کو 20-50% تک کم کیا جا سکتا ہے۔
فریکوئنسی کنورٹرز کے لیے تکنیکی دستاویزات سے پتہ چلتا ہے کہ پمپنگ یونٹس میں ایڈجسٹ ایبل الیکٹرک ڈرائیو کا استعمال آپ کو صاف اور گندے پانی کو پمپ کرنے پر خرچ ہونے والی توانائی کا 50% تک بچانے کی اجازت دیتا ہے، اور ادائیگی کی مدت تین سے نو ماہ تک ہے۔
ایک ہی وقت میں، آپریٹنگ پمپ یونٹس میں کنٹرول شدہ الیکٹرک ڈرائیو کی تاثیر کا حساب اور تجزیہ ظاہر کرتا ہے کہ 75 کلو واٹ تک کی طاقت والے یونٹ والے چھوٹے پمپ یونٹوں کے لیے، خاص طور پر جب وہ ایک بڑے جامد دباؤ والے جزو کے ساتھ کام کرتے ہیں، یہ پتہ چلتا ہے۔ کنٹرول شدہ الیکٹرک ڈرائیوز استعمال کرنے کے لیے موزوں نہیں۔ ان صورتوں میں، آپ تھروٹلنگ کا استعمال کرتے ہوئے، کام کرنے والے پمپ یونٹوں کی تعداد کو تبدیل کرکے آسان کنٹرول سسٹم استعمال کرسکتے ہیں۔
پمپ یونٹ آٹومیشن سسٹم میں متغیر الیکٹرک ڈرائیو کا استعمال، ایک طرف، توانائی کی کھپت کو کم کرتا ہے، اور دوسری طرف، اضافی سرمائے کی لاگت کی ضرورت ہوتی ہے، اس لیے پمپ یونٹوں میں متغیر الیکٹرک ڈرائیو کے استعمال کا امکان کم ہونے والے اخراجات کا موازنہ کرکے طے کیا جاتا ہے۔ دو اختیارات میں سے: بنیادی اور نیا۔ ایڈجسٹ ایبل الیکٹرک ڈرائیو سے لیس ایک پمپنگ یونٹ کو ایک نئے آپشن کے طور پر لیا جاتا ہے، اور ایک یونٹ جس کے یونٹ مستقل رفتار سے کام کرتے ہیں اسے اہم کے طور پر لیا جاتا ہے۔