الیکٹرک ڈرائیوز کی مکینیکل خصوصیات
 برقی ڈرائیو کا انتخاب کام کی مشین کی ضروریات کی طرف سے مقرر کیا جاتا ہے. الیکٹرک ڈرائیو کو یقینی بنانا چاہیے کہ کام کرنے والی مشین مخصوص ٹیکنالوجی کو تمام ممکنہ طریقوں میں انجام دے: لوڈ شروع کرنا، وصول کرنا اور خارج کرنا، رکنا، رفتار کو تبدیل کرنا، مسلسل بوجھ۔ ان طریقوں کی نوعیت کا تعین بنیادی طور پر انجن اور کام کرنے والی مشین کی مکینیکل خصوصیات سے ہوتا ہے... انجن اور کام کرنے والی مشین دونوں کی مکینیکل خصوصیات کو جانچنے کا ایک اہم معیار ان کی میکانی خصوصیات ہیں۔
برقی ڈرائیو کا انتخاب کام کی مشین کی ضروریات کی طرف سے مقرر کیا جاتا ہے. الیکٹرک ڈرائیو کو یقینی بنانا چاہیے کہ کام کرنے والی مشین مخصوص ٹیکنالوجی کو تمام ممکنہ طریقوں میں انجام دے: لوڈ شروع کرنا، وصول کرنا اور خارج کرنا، رکنا، رفتار کو تبدیل کرنا، مسلسل بوجھ۔ ان طریقوں کی نوعیت کا تعین بنیادی طور پر انجن اور کام کرنے والی مشین کی مکینیکل خصوصیات سے ہوتا ہے... انجن اور کام کرنے والی مشین دونوں کی مکینیکل خصوصیات کو جانچنے کا ایک اہم معیار ان کی میکانی خصوصیات ہیں۔
الیکٹرک موٹرز کی مکینیکل خصوصیات
الیکٹرک موٹر کی مکینیکل خصوصیت موٹر ω=φ(Md) یا n = e(Md) کے ذریعہ تیار کردہ ٹارک پر شافٹ کی گردش کی رفتار کا انحصار ہے جہاں ω — شافٹ کی گردش کی کونیی رفتار، ریڈ / سیکنڈ، n - شافٹ گردش کی رفتار، rpm
موٹر کی مکینیکل خصوصیت کو قدرتی انحصار کہا جاتا ہے n = f (M) پاور نیٹ ورک کے برائے نام پیرامیٹرز، عام کنکشن اسکیم اور بجلی کے سرکٹ میں اضافی مزاحمت کے بغیر حاصل کیا جاتا ہے۔
اگر اضافی مزاحمتیں ہوں یا موٹر کو کسی وولٹیج یا فریکوئنسی والے نیٹ ورک سے فیڈ کیا گیا ہو، تو موٹر کی مکینیکل خصوصیات کو مصنوعی کہا جائے گا... ظاہر ہے، موٹر میں مصنوعی خصوصیات کی لامحدود تعداد ہے اور صرف ایک قدرتی.
زیادہ تر الیکٹرک موٹرز، بوجھ کے تحت، ٹارک بڑھنے کے ساتھ ہی رفتار میں کمی آتی ہے۔ اس معاملے میں خصوصیت کو گرنا کہا جاتا ہے... ٹارک میں تبدیلی کے ساتھ انجن کی رفتار میں تبدیلی کی ڈگری کا اندازہ میکانکی خصوصیات کی نام نہاد سختی سے لگایا جاتا ہے، جس کا تعین α = ΔM / Δω یا α = ΔM کے تناسب سے ہوتا ہے۔ / Δн
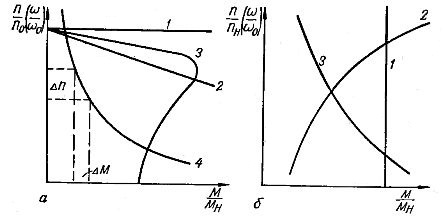
چاول۔ 1. مکینیکل خصوصیات کی مختلف اقسام: a — الیکٹرک موٹرز، b — پروڈکشن مشینیں۔
لمحے میں تبدیلی کی اقدار اور سختی کے تعین میں گرنے کی شرح کو عام طور پر رشتہ دار اکائیوں میں لیا جاتا ہے۔ یہ مختلف قسم کے انجنوں کی خصوصیات کا موازنہ کرنا ممکن بناتا ہے۔
سختی کی ڈگری پر منحصر ہے، انجن کی تمام مکینیکل خصوصیات کو مندرجہ ذیل گروپوں میں تقسیم کیا گیا ہے۔
1. سختی کی قدر کے ساتھ مطلق بھاری کارکردگی α = ∞… ہم وقت ساز موٹرز میں ایسی میکانکی خصوصیات ہوتی ہیں (کرو 1، تصویر 1، a) سختی سے مسلسل گردش کی رفتار کے ساتھ۔
2. بڑھتی ہوئی ٹارک اور α = 40 — 10 کے ساتھ رفتار میں نسبتاً کم کمی کے ساتھ ٹھوس خصوصیات۔اس گروپ میں آزاد اتیجیت (وکر 2) کے ساتھ ڈی سی موٹرز کی قدرتی خصوصیات اور لکیری حصے (وکر 3) میں انڈکشن موٹرز کی خصوصیات شامل ہیں۔
3. نرم مکینیکل خصوصیات جن کی رفتار میں بڑے رشتہ دار کمی کے ساتھ ٹارک میں اضافہ ہوتا ہے اور α = 10 تک سختی ہوتی ہے۔ اس طرح کی خصوصیات میں سیریز کے اتیجیت کے ساتھ DC موٹریں ہوتی ہیں (کرو 4)، آزادانہ طور پر پرجوش موٹریں زیادہ آرمچر مزاحمت کے ساتھ اور غیر مطابقت پذیر موٹرز اضافی مزاحمت کے ساتھ۔ روٹر سرکٹ میں.
الیکٹرک ڈرائیو کے آپریشن کے دوران، کام کرنے والی مشین کی مزاحمت پر قابو پانے کے لیے، موٹر کو ایک خاص لمحہ تیار کرنا چاہیے۔ لہذا، انجن کا انتخاب کرتے وقت، سب سے پہلے انجن اور کام کرنے والی مشین کی خصوصیات کی خط و کتابت کی نشاندہی کرنا ضروری ہے۔

کام کرنے والی مشینوں کی مکینیکل خصوصیات
ورکنگ مشین کی مکینیکل خصوصیت ڈرائیو شافٹ کی گردش کی رفتار پر مشین کی جامد مزاحمت کے لمحے کا انحصار ہے۔ مشترکہ تعمیر کی سہولت کے لیے، یہ انحصار عام طور پر موٹر کی خصوصیت کی طرح ω=φ(Ms -Ms) یا n =e(Miss) کی شکل میں ظاہر کیا جاتا ہے۔
جامد مزاحمت کا لمحہ محترمہ، یا مختصر طور پر جامد لمحہ، اس وقت مزاحمت کا وہ لمحہ ہے جو مشین کی طرف سے ڈرائیو شافٹ پر ایک جامد (اسٹیشنری) موڈ میں پیدا ہوتا ہے جب رفتار تبدیل نہیں ہوتی ہے۔
مشین کی مکینیکل خصوصیات تجرباتی طور پر یا حساب سے حاصل کی جا سکتی ہیں اگر جامد قوتوں کی تقسیم یا کائیمیٹک اسکیم کے عناصر پر لمحات معلوم ہوں۔مشینوں کے جامد لمحات نہ صرف رفتار پر منحصر ہوسکتے ہیں، بلکہ دیگر مقداروں پر بھی، لہذا، الیکٹرک ڈرائیوز کے عملی حساب کتاب میں، ہر معاملے پر الگ الگ غور کرنا ضروری ہے۔
مختلف کام کرنے والی مشینوں کے جامد لمحات کو ان کی رفتار پر انحصار کی نوعیت (مکینیکل خصوصیات) کے مطابق گروپوں میں تقسیم کیا گیا ہے۔ عملی طور پر سب سے زیادہ عام درج ذیل ہیں۔
1. جامد لمحہ بہت کم انحصار کرتا ہے یا عملی طور پر رفتار پر منحصر نہیں ہوتا ہے (وکر 1، تصویر 2، بی)۔ اس طرح کی خصوصیات میں لفٹنگ میکانزم، کرینیں، ونچز، لہرانے کے ساتھ ساتھ بیلٹ کنویرز مسلسل بوجھ کے تحت ہوتے ہیں۔
2. مشین کا جامد لمحہ رفتار کے مربع (وکر 2) کے تناسب سے بڑھتا ہے۔ اس خصوصیت، محوری پنکھوں کی خصوصیت کو پنکھے کی خصوصیت کہا جاتا ہے اور تجزیاتی طور پر فارمولے کی شکل میں پیش کیا جاتا ہے: Mc = Mo + kn2، جہاں Mo ابتدائی جامد لمحہ ہے، اکثر رگڑ کی قوتوں کی وجہ سے، جو عام طور پر نہیں ہوتا۔ رفتار پر منحصر ہے، k تجرباتی گتانک ہے۔ پنکھے کے علاوہ، سینٹری فیوگل اور ورٹیکس پمپ، سیپریٹرز، سینٹری فیوجز، پروپیلرز، ٹربو چارجرز، اور گھومنے والے ڈرم آئیڈلرز میں پنکھے کی خصوصیات ہوتی ہیں۔
3. جامد لمحہ بڑھتی ہوئی رفتار کے ساتھ کم ہوتا ہے (وکر 3)۔ اس گروپ میں کچھ کنویئر میکانزم اور کچھ دھاتی کاٹنے والی مشینوں کی خصوصیات شامل ہیں۔
4. جامد لمحہ رفتار کے ساتھ مبہم طور پر مختلف ہوتا ہے، تکنیکی عمل کی خصوصیات کی وجہ سے تیز منتقلی کے ساتھ۔ اس گروپ کی خصوصیات میں ایسی مشینیں ہیں جو بار بار بڑے اوورلوڈ کے ساتھ کام کرتی ہیں، جو کبھی کبھی مکمل بند ہونے کا باعث بنتی ہیں۔مثال کے طور پر، ایک بالٹی کھدائی کرنے والے، کھرچنے والے کنویئر کے لیے سکوپنگ میکانزم، نقل و حمل کے بڑے پیمانے پر بلاکنگ کے تحت کام کرنا، کرشرز اور دیگر مشینیں۔
ان فہرستوں کے علاوہ، عملی طور پر مشینوں کی دوسری قسم کی مکینیکل خصوصیات ہیں، مثال کے طور پر، پسٹن پمپ اور کمپریسرز، جن کے جامد لمحات راستے پر منحصر ہوتے ہیں۔