لیتھ گروپ کی دھات کاٹنے والی مشینوں کے میکانزم کی برقی موٹروں کی طاقت کا حساب
رفتار کنٹرول کے ساتھ برقی موٹر کی طاقت کا حساب لگاتے وقت، میکانزم کی مکینیکل خصوصیات کو مدنظر رکھنا ضروری ہے۔
بنیادی حرکت کے طریقہ کار کے لیے، جس میں دو زون کی رفتار کو کنٹرول کیا جاتا ہے: مستقل ٹارک اور مستقل طاقت کے ساتھ، الیکٹرک موٹر کی طاقت کا حساب فارمولے سے کیا جاتا ہے۔
جہاں: Mmax — مسلسل بوجھ کے تحت زیادہ سے زیادہ مزاحمت اور بار بار مختصر مدت کے بوجھ کے تحت زیادہ سے زیادہ مساوی مزاحمت؛ ωn — مسلسل ٹارک ایڈجسٹمنٹ کے ساتھ زیادہ سے زیادہ رفتار (برائے بہاؤ کی شرح پر)۔
پاور ڈرائیو کے لیے، طاقت کا تعین زیادہ سے زیادہ مساوی ٹارک اور زیادہ سے زیادہ رفتار کی بنیاد پر کیا جاتا ہے۔ سپیڈ ریگولیشن کی ایک بڑی رینج کے ساتھ، یہ آزاد وینٹیلیشن یا بند قسم کے ساتھ الیکٹرک موٹرز استعمال کرنے کی سفارش کی جاتی ہے۔ خود وینٹیلیشن کے ساتھ الیکٹرک موٹر کا استعمال کرتے وقت، کم رفتار پر اس کی ٹھنڈک کی خرابی کو مدنظر رکھنا ضروری ہے۔
غیر منظم انجنوں کے لئے، ایک اصول کے طور پر، S6 موڈ میں کام کرتے ہیں (اگر سائیکل 10 منٹ سے زیادہ نہیں ہے)، مندرجہ ذیل کے طور پر طاقت کا حساب کیا جاتا ہے.
ہر آپریشن کے لیے الیکٹرک موٹر کی طاقت کا تعین فارمولے سے کیا جاتا ہے:

جہاں: Pzi، η — بالترتیب مشین کی طاقت اور کارکردگی۔
لوڈ پر منحصر کارکردگی کا تعین بجلی کے نقصانات کی بنیاد پر کیا جاتا ہے، اظہار کی بنیاد پر:

کہاں: Pnz - برائے نام کاٹنے کی طاقت؛ α اور β - مستقل اور متغیر نقصان کے گتانک۔
بوجھ کے عنصر کو مدنظر رکھنا

مشین کی کارکردگی
K = 1 کیس کے لیے
ہر بوجھ پر کارکردگی کا تعین کرنے کے لیے نقصانات کو تقسیم کرنا
عملی حسابات کے لیے ابتدائی کو قبول کیا جاتا ہے۔
ٹرننگ، ملنگ، ڈرلنگ مشینوں کی مرکزی حرکت کی ڈرائیوز کے لیے، مستقل بوجھ کے تحت کارکردگی 0.7... 0.8، پیسنے والی مشینوں کے لیے 0.8... 0.9 ہے۔ مشین کے بیکار انقلابات پر الیکٹرک موٹر کی طاقت کا تعین اس فارمولے سے کیا جاتا ہے:

ہر منتقلی کے لیے آپریشن کی مدت کا تعین فارمولے سے کیا جاتا ہے:

کہاں: l - منتقلی کی لمبائی، ملی میٹر؛ S — فیڈ، ملی میٹر/ریو؛ n — سپنڈل کی گردش کی رفتار، rev/min.
حصہ کو انسٹال کرنے اور ہٹانے کا وقت 1-3 منٹ کے برابر ہے۔ ہر آپریشن کے لیے حسابی طاقت اور وقت کی بنیاد پر، ایک لوڈ ڈایاگرام بنایا جاتا ہے اور مساوی طاقت کا تعین کیا جاتا ہے۔

اسپیڈ کنٹرول کے ساتھ الیکٹرک ڈرائیو کا استعمال کرتے وقت، طاقت کے لحاظ سے موٹر کا انتخاب کرتے وقت، بوجھ اور فی گھنٹہ شروع ہونے والی فریکوئنسی دونوں کے لحاظ سے سب سے شدید آپریٹنگ موڈ فرض کیا جاتا ہے۔
اس صورت میں، الیکٹرک موٹر کا ابتدائی انتخاب مساوی ٹارک کے مطابق کیا جاتا ہے، Kd = 1.1-1.5 کی حدود میں حرکیات کے لیے حفاظتی عنصر اور شمولیت کی ممکنہ مدت کو مدنظر رکھتے ہوئے کیا جاتا ہے۔
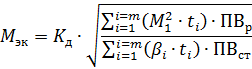
جہاں: βi — گتانک جو i -th وقفہ میں الیکٹرک موٹر کی کولنگ کے بگاڑ کو مدنظر رکھتا ہے، جب رفتار برائے نام سے نیچے گر جاتی ہے۔
β- اسٹیشنری آرمچر کی صورت میں حرارت کی منتقلی کے بگاڑ کا گتانک؛ PVR, PVst — شامل کرنے کی مدت کی حسابی اور معیاری قدر۔
انجن کی طاقت کا تعین فارمولے سے ہوتا ہے۔
اس کے بعد موٹر، ورک پیس اور مشین کے مکینیکل حصوں کی جڑتا کے اصل لمحے کو مدنظر رکھتے ہوئے، اوورلوڈ اور حرارتی صلاحیت کی جانچ کی جاتی ہے۔