برقی موٹروں کو گرم اور ٹھنڈا کرنا
 مختلف دھاتی کاٹنے والی مشینوں، میکانزم اور مشینوں کے لیے برقی موٹروں کی طاقت کا درست تعین بہت اہمیت کا حامل ہے۔ ناکافی طاقت کے ساتھ، منصوبہ بند تکنیکی عمل کو انجام دینے کے لیے مشین کی پیداواری صلاحیتوں کو مکمل طور پر استعمال کرنا ناممکن ہے۔ اگر بجلی ناکافی ہے تو برقی موٹر وقت سے پہلے ناکام ہو جائے گی۔
مختلف دھاتی کاٹنے والی مشینوں، میکانزم اور مشینوں کے لیے برقی موٹروں کی طاقت کا درست تعین بہت اہمیت کا حامل ہے۔ ناکافی طاقت کے ساتھ، منصوبہ بند تکنیکی عمل کو انجام دینے کے لیے مشین کی پیداواری صلاحیتوں کو مکمل طور پر استعمال کرنا ناممکن ہے۔ اگر بجلی ناکافی ہے تو برقی موٹر وقت سے پہلے ناکام ہو جائے گی۔
الیکٹرک موٹر کی طاقت کا زیادہ اندازہ لگانا اس کی منظم انڈر چارجنگ کا باعث بنتا ہے اور اس کے نتیجے میں، موٹر کا نامکمل استعمال، کم کارکردگی کے ساتھ اس کا آپریشن اور ایک چھوٹا پاور فیکٹر (ایسائینکرونس موٹرز کے لیے)۔ اس کے علاوہ، جب انجن کی طاقت زیادہ ہو جاتی ہے، تو سرمایہ اور آپریٹنگ اخراجات بڑھ جاتے ہیں۔
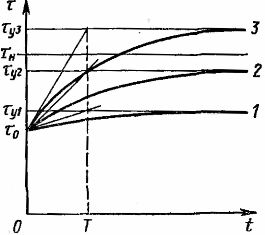
مشین کو چلانے کے لیے درکار طاقت، اور اس لیے الیکٹرک موٹر کے ذریعے تیار کردہ طاقت، مشین کے آپریشن کے دوران بدل جاتی ہے۔ الیکٹرک موٹر پر بوجھ کو لوڈ گراف (تصویر 1) سے ظاہر کیا جا سکتا ہے، جو کہ موٹر شافٹ، اس کے ٹارک یا بروقت کرنٹ کی طاقت کا انحصار ہے۔ورک پیس کی پروسیسنگ مکمل کرنے کے بعد، مشین کو روک دیا جاتا ہے، ورک پیس کی پیمائش کی جاتی ہے، اور ورک پیس کو تبدیل کر دیا جاتا ہے۔ اس کے بعد لوڈنگ شیڈول دوبارہ دہرایا جاتا ہے (جب ایک ہی قسم کے پرزوں پر کارروائی کی جاتی ہے)۔
اس طرح کے متغیر بوجھ کے تحت نارمل آپریشن کو یقینی بنانے کے لیے، الیکٹرک موٹر کو پروسیسنگ کے دوران سب سے زیادہ مطلوبہ پاور تیار کرنی چاہیے اور اس لوڈ شیڈول کے مطابق مسلسل آپریشن کے دوران زیادہ گرم نہیں ہونا چاہیے۔ الیکٹرک موٹروں کے جائز اوورلوڈ کا تعین ان کی برقی خصوصیات سے ہوتا ہے۔
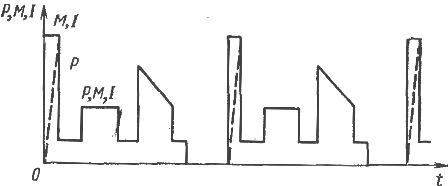
چاول۔ 1. اسی قسم کے پرزوں کی مشین کرتے وقت شیڈول لوڈ کریں۔
جب انجن چل رہا ہو، توانائی (اور طاقت) کے نقصاناتاس کے گرم ہونے کا سبب بنتا ہے. الیکٹرک موٹر کی طرف سے استعمال ہونے والی توانائی کا کچھ حصہ اس کے ونڈوں کو گرم کرنے، مقناطیسی سرکٹ کو گرم کرنے پر خرچ ہوتا ہے۔ ہسٹریسس اور رگڑ اور ہوا کی رگڑ کو لے جانے والے ایڈی کرنٹ۔ کرنٹ کے مربع کے متناسب وائنڈنگز کے حرارت کے نقصانات کو متغیر (ΔРtrans) کہا جاتا ہے... موٹر میں بقیہ نقصانات اس کے بوجھ پر تھوڑا سا منحصر ہوتے ہیں اور روایتی طور پر مستقل (ΔРpos) کہلاتے ہیں۔
الیکٹرک موٹر کی قابل اجازت حرارت کا تعین اس کی تعمیر کے کم سے کم گرمی سے بچنے والے مواد سے کیا جاتا ہے۔ یہ مواد اس کی کنڈلی کی موصلیت ہے۔
برقی مشینوں کو موصل کرنے کے لیے درج ذیل کا استعمال کیا جاتا ہے۔
• سوتی اور ریشم کے کپڑے، دھاگے، کاغذ اور ریشے دار نامیاتی مواد جو موصلی مرکبات (گرمی کے خلاف مزاحمت کی کلاس U) کے ساتھ رنگدار نہیں ہیں؛
• وہی مواد، رنگدار (کلاس اے)؛
مصنوعی نامیاتی فلمیں (کلاس ای)؛
• نامیاتی بائنڈر کے ساتھ ایسبیسٹس، میکا، فائبر گلاس سے مواد (کلاس B)؛
• ایک جیسا، لیکن مصنوعی بائنڈر اور حاملہ کرنے والے ایجنٹوں (کلاس F) کے ساتھ؛
• وہی مواد، لیکن سلیکون بائنڈرز اور حاملہ کرنے والے ایجنٹوں کے ساتھ (کلاس H)؛
• ابرک، سیرامکس، گلاس، کوارٹج بغیر بائنڈر کے یا غیر نامیاتی بائنڈر (کلاس C) کے ساتھ۔
موصلیت کی کلاسیں U, A, E, B, F, H بالترتیب 90, 105, 120, 130, 155, 180 ° C کے زیادہ سے زیادہ درجہ حرارت کی اجازت دیتی ہیں۔ کلاس C کا محدود درجہ حرارت 180 ° C سے زیادہ ہے اور اس کی خصوصیات سے محدود ہے۔ استعمال شدہ مواد
الیکٹرک موٹر پر ایک ہی بوجھ کے ساتھ، اس کی حرارت مختلف محیطی درجہ حرارت پر ناہموار ہوگی۔ ماحول کا ڈیزائن درجہ حرارت t0 40 ° C ہے۔ اس درجہ حرارت پر، الیکٹرک موٹروں کی برائے نام طاقت کی قدروں کا تعین کیا جاتا ہے۔ محیط درجہ حرارت سے اوپر الیکٹرک موٹر کے درجہ حرارت میں اضافے کو اوور ہیٹنگ کہا جاتا ہے:

مصنوعی موصلیت کا استعمال پھیل رہا ہے۔ خاص طور پر، سلکان سلکان موصلیت اشنکٹبندیی حالات میں کام کرتے وقت برقی مشینوں کی اعلی وشوسنییتا کو یقینی بناتی ہے۔
انجن کے مختلف حصوں میں پیدا ہونے والی حرارت موصلیت کی حرارت کو مختلف ڈگریوں تک متاثر کرتی ہے۔ اس کے علاوہ، برقی موٹر کے انفرادی حصوں کے درمیان گرمی کا تبادلہ ہوتا ہے، جس کی نوعیت لوڈ کی حالت پر منحصر ہوتی ہے.
برقی موٹر کے انفرادی حصوں کی مختلف حرارت اور ان کے درمیان حرارت کی منتقلی اس عمل کے تجزیاتی مطالعہ کو پیچیدہ بناتی ہے۔ اس لیے، سادگی کے لیے، یہ مشروط طور پر فرض کیا جاتا ہے کہ برقی موٹر تھرمل طور پر یکساں اور لامحدود حد تک حرارت چلانے والا جسم ہے۔ عام طور پر یہ خیال کیا جاتا ہے کہ الیکٹرک موٹر کے ذریعے ماحول میں جو گرمی جاری ہوتی ہے وہ سپر ہیٹ کے متناسب ہوتی ہے۔اس صورت میں، تھرمل تابکاری کو نظر انداز کیا جاتا ہے کیونکہ موٹروں کا مطلق حرارتی درجہ حرارت کم ہوتا ہے۔ دی گئی مفروضوں کے تحت الیکٹرک موٹر کے حرارتی عمل پر غور کریں۔
الیکٹرک موٹر میں کام کرتے وقت، dt کے دوران ہیٹ dq جاری کیا جاتا ہے۔ اس حرارت کا ایک حصہ dq1 الیکٹرک موٹر کے بڑے پیمانے پر جذب ہوتا ہے، جس کے نتیجے میں موٹر کا درجہ حرارت t اور زیادہ گرمی τ میں اضافہ ہوتا ہے۔ بقیہ حرارت dq2 انجن سے ماحول میں خارج ہوتی ہے۔ اس طرح مساوات لکھی جا سکتی ہے۔
جیسے جیسے انجن کا درجہ حرارت بڑھتا ہے، گرمی dq2 بڑھ جاتی ہے۔ زیادہ گرمی کی ایک خاص قدر پر، ماحول کو اتنی ہی حرارت دی جائے گی جتنی بجلی کی موٹر میں جاری کی جاتی ہے۔ پھر dq = dq2 اور dq1 = 0۔ الیکٹرک موٹر کا درجہ حرارت بڑھنا بند ہو جاتا ہے اور زیادہ گرمی τу کی سٹیشنری ویلیو تک پہنچ جاتی ہے۔
مندرجہ بالا مفروضوں کے تحت، مساوات کو اس طرح لکھا جا سکتا ہے:

جہاں الیکٹرک موٹر میں نقصانات کی وجہ سے Q تھرمل پاور ہے، J/s؛ A — انجن سے حرارت کی منتقلی، یعنی انجن اور 1oC، J/s-deg کے ماحول کے درمیان درجہ حرارت کے فرق پر فی یونٹ وقت میں انجن کی طرف سے ماحول میں خارج ہونے والی حرارت کی مقدار؛ C موٹر کی تھرمل صلاحیت ہے، یعنی انجن کے درجہ حرارت کو 1 ° C، J/deg تک بڑھانے کے لیے درکار حرارت کی مقدار۔
مساوات میں متغیرات کو الگ کرنا، ہمارے پاس ہے۔
ہم مساوات کے بائیں جانب کو صفر سے لے کر وقت کی کچھ موجودہ قدر تک اور دائیں جانب کو برقی موٹر کی ابتدائی حد سے زیادہ گرمی τ0 سے لے کر اوور ہیٹنگ τ کی موجودہ قدر تک کی حد میں ضم کرتے ہیں۔
τ کے لیے مساوات کو حل کرتے ہوئے، ہم برقی موٹر کو گرم کرنے کے لیے ایک مساوات حاصل کرتے ہیں:
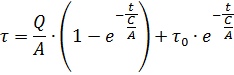
آئیے C/A = T کی نشاندہی کرتے ہیں اور اس تناسب کے طول و عرض کا تعین کرتے ہیں:

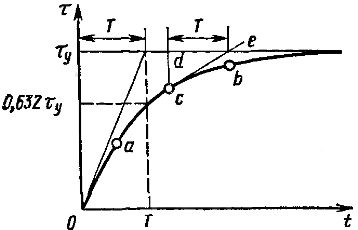
چاول۔ 2. الیکٹرک موٹر کی حرارتی خصوصیات کے منحنی خطوط
چاول۔ 3. حرارتی وقت مسلسل کا تعین
اسے مقدار T کہا جاتا ہے، جس میں ٹائم ہیٹنگ ٹائم مستقل الیکٹرک موٹر کا طول و عرض ہوتا ہے۔ اس اشارے کے مطابق، حرارتی مساوات کو دوبارہ لکھا جا سکتا ہے۔
جیسا کہ آپ مساوات سے دیکھ سکتے ہیں، جب ہم حاصل کرتے ہیں — مستحکم اسٹیٹ سپر ہیٹ ویلیو۔
جب الیکٹرک موٹر پر بوجھ تبدیل ہوتا ہے، نقصانات کی مقدار بدل جاتی ہے اور اسی وجہ سے Q کی قدر۔ یہ τу کی قدر میں تبدیلی کا باعث بنتی ہے۔
انجیر میں۔ 2 حرارتی منحنی خطوط 1، 2، 3 دکھاتا ہے جو مختلف بوجھ کی قدروں کے لیے آخری مساوات سے مطابقت رکھتا ہے۔ جب τу جائز حد سے زیادہ گرم ہونے والے τn کی قدر سے زیادہ ہو جائے تو، الیکٹرک موٹر کا مسلسل آپریشن ناقابل قبول ہے۔ جیسا کہ مساوات اور گراف (تصویر 2) سے درج ذیل ہے، سپر ہیٹ میں اضافہ غیر علامتی ہے۔
جب ہم قدر t = 3T کو مساوات میں بدلتے ہیں، تو ہمیں τ کی قدر ملتی ہے جو کہ τy سے تقریباً 5% کم ہے۔ اس طرح، وقت کے دوران t = 3T، حرارتی عمل کو عملی طور پر مکمل سمجھا جا سکتا ہے۔
اگر حرارتی منحنی خطوط (تصویر 3) کے ساتھ کسی بھی نقطہ پر آپ حرارتی منحنی خطوط پر ایک مماس کھینچتے ہیں، پھر اسی نقطہ کے ذریعے عمودی کھینچیں، پھر اسمپٹوٹ کا سیگمنٹ ڈی، ٹینجنٹ اور عمودی کے درمیان بند، پیمانے پر abscissa محور کا T کے برابر ہے۔ اگر ہم مساوات میں Q = 0 لیں، تو ہمیں موٹر کولنگ مساوات ملتی ہے:

کولنگ وکر تصویر میں دکھایا گیا ہے۔ 4، اس مساوات کے مساوی ہے۔
حرارتی وقت کا مستقل تعین الیکٹرک موٹر کے سائز اور ماحولیاتی اثرات کے خلاف اس کے تحفظ کی شکل سے ہوتا ہے۔ کھلی اور محفوظ کم طاقت والی برقی موٹروں کے لیے، حرارتی وقت 20-30 منٹ ہے۔ بند ہائی پاور الیکٹرک موٹرز کے لیے، یہ 2-3 گھنٹے تک پہنچ جاتا ہے۔
جیسا کہ اوپر ذکر کیا گیا ہے، الیکٹرک موٹر ہیٹنگ کا بیان کردہ نظریہ تخمینی ہے اور کسی نہ کسی طرح کے مفروضوں پر مبنی ہے۔ لہذا، تجرباتی طور پر ماپا جانے والا حرارتی وکر نظریاتی سے نمایاں طور پر مختلف ہے۔ اگر، تجرباتی حرارتی وکر کے مختلف پوائنٹس کے لیے، تصویر میں دکھایا گیا تعمیر۔ 3، یہ پتہ چلتا ہے کہ T کی قدریں بڑھتے وقت کے ساتھ بڑھتی ہیں۔ لہذا، مساوات کے مطابق بنائے گئے تمام حسابات کو تخمینی سمجھا جانا چاہیے۔ ان حسابات میں یہ مشورہ دیا جاتا ہے کہ حرارتی منحنی خطوط کے نقطہ آغاز کے لیے گرافی طور پر متعین مستقل T کا استعمال کریں۔ T کی یہ قدر سب سے چھوٹی ہے اور استعمال ہونے پر، انجن کی طاقت کا ایک خاص مارجن فراہم کرتی ہے۔
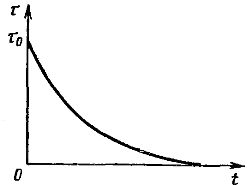
چاول۔ 4. انجن کولنگ وکر
تجرباتی طور پر ماپا جانے والا کولنگ وکر تھیوریٹیکل وکر سے حرارتی وکر سے بھی زیادہ مختلف ہے۔ انجن کے بند کے مطابق ٹھنڈک کا وقت مسلسل حرارتی وقت کے مقابلے میں نمایاں طور پر لمبا ہوتا ہے جس کی وجہ وینٹیلیشن کی عدم موجودگی میں حرارت کی منتقلی کم ہوتی ہے۔