دھاتی کاٹنے والی مشینوں کی معاون ڈرائیوز کے لیے برقی موٹروں کا انتخاب
 مشین ٹولز پر معاون ڈرائیوز (کیلیپرز، ہیڈ پیڈز، کراس آرمز وغیرہ کے لیے کوئیک ڈرائیوز) عام طور پر شارٹ ٹائم لوڈ موڈ میں کام کرتی ہیں۔ اس دورانیے کی الیکٹرک ڈرائیو کے آپریشن کا موڈ، جس میں الیکٹرک ڈرائیو میں شامل تمام آلات کا درجہ حرارت آپریشن کے دوران سٹیشنری ویلیو تک نہیں پہنچتا اور وقفے کے دوران محیطی درجہ حرارت تک کم ہو جاتا ہے، اسے شارٹ ٹرم کہا جاتا ہے۔
مشین ٹولز پر معاون ڈرائیوز (کیلیپرز، ہیڈ پیڈز، کراس آرمز وغیرہ کے لیے کوئیک ڈرائیوز) عام طور پر شارٹ ٹائم لوڈ موڈ میں کام کرتی ہیں۔ اس دورانیے کی الیکٹرک ڈرائیو کے آپریشن کا موڈ، جس میں الیکٹرک ڈرائیو میں شامل تمام آلات کا درجہ حرارت آپریشن کے دوران سٹیشنری ویلیو تک نہیں پہنچتا اور وقفے کے دوران محیطی درجہ حرارت تک کم ہو جاتا ہے، اسے شارٹ ٹرم کہا جاتا ہے۔
دھاتی کاٹنے والی مشینوں پر معاون ڈرائیوز کا آپریٹنگ وقت عام طور پر کم ہوتا ہے۔ یہ 5 - 15 سیکنڈ سے زیادہ نہیں ہے، اور صرف بھاری مشینوں کے لیے یہ 1 - 1.5 منٹ تک پہنچ جاتا ہے۔ اس وقت کے دوران (t <0.1T) اوورلوڈ کے ساتھ جائز حدوں کے اندر، الیکٹرک موٹر کے پاس عام حد سے زیادہ گرم ہونے تک گرم ہونے کا وقت نہیں ہوتا ہے۔ اس معاملے میں الیکٹرک موٹر کی ریٹیڈ پاور کا تعین اوورلوڈ حالات سے ہوتا ہے۔
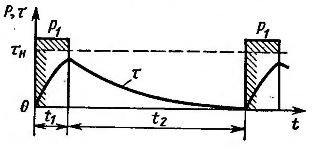
چاول۔ 1. قلیل مدتی آپریشن کے لیے وکر لوڈ کریں۔
معاون ڈرائیوز کے آپریشن کے دوران مزاحمت کا لمحہ Mc بنیادی طور پر رگڑ قوتوں کے ذریعے تخلیق کیا جاتا ہے، اور اس لیے یہ ڈرائیوز، مرکزی حرکت کی ڈرائیوز کے برعکس، ایک اہم ابتدائی ٹارک کی ضرورت ہوتی ہے۔
افقی طور پر حرکت پذیر مشین عنصر کو حرکت دیتے وقت رگڑ کی قوتوں پر قابو پانے کے لیے استعمال شدہ طاقت:

جہاں Ftp — رگڑ کی قوت، N؛ v - رفتار، m/s؛ G — منتقل ہونے والی یونٹ کی کشش ثقل (وزن)، N؛ μ — حرکت کی رگڑ کا گتانک۔
موٹر شافٹ پاور P = Ptr /η،
جہاں η — c. پی ڈی ٹرانسمیشن، عام طور پر η = 0.1 - 0.2۔
زیر غور موڈ میں آپریشن کے دوران الیکٹرک موٹر کی حرارت غیر معمولی ہے. لہذا، اس کے جائز اوورلوڈ کو استعمال کرنے کی سفارش کی جاتی ہے۔
شرح شدہ طاقت Pn = Ptr /(λη)،
جہاں λ - قابل اجازت اوورلوڈ کا گتانک۔
موٹے طور پر، یہ اس کے کام کرنے والے حصے میں انجن کی خصوصیت واضح ہے کہ سمجھا جا سکتا ہے. پھر اوورلوڈ آپریشن میں موٹر کی کونیی رفتار
ωλ = ωО (1 - λсн)،
جہاں، ωО = (πнО)/30- الیکٹرک موٹر کی ہم وقت ساز کونیی رفتار۔
فارمولہ Pn = Ptr /(λη) کا استعمال کرتے ہوئے، موٹر کا اوورلوڈ ٹارک تلاش کریں۔
انجن شروع کرنے کے آغاز میں مزاحمت کا لمحہ اس کے آپریشن کے دوران سے زیادہ ہے۔ اس پل
جہاں μО — باقی جگہ پر رگڑ کا گتانک۔
مشین کی معاون ڈرائیوز کی برقی موٹروں کو منتخب کرنے کا طریقہ کار
سب سے پہلے، فارمولہ Pn = Ptr /(λη) کا استعمال کرتے ہوئے کیٹلاگ سے ایک الیکٹرک موٹر کا انتخاب کیا جاتا ہے، جس کے لیے شروع ہونے والے ٹارک Mnach کا تعین کیا جاتا ہے۔ فارمولے سے لمحہ Mso کا حساب لگائیں اور لمحہ Mnach کے ساتھ موازنہ کریں۔اگر 0.85 Mnig> Mso، تو منتخب موٹر معاون ڈرائیو کے لیے موزوں ہے۔
مشین یونٹوں کو موڑنے اور اٹھانے کے لیے ڈرائیوز کا حساب اسی طرح کیا جاتا ہے، صرف بعد کی صورت میں مرکزی بوجھ اکثر منتقل شدہ یونٹ کی کشش ثقل (وزن) کی طاقت سے پیدا ہوتا ہے۔
ٹول کو ورک پیس تک تیزی سے پہنچانے کے لیے زیادہ سے زیادہ رفتار کا انتخاب کرنا خاص اہمیت کا حامل ہے۔ آلے کے قریب پہنچنے پر، تیز رفتار حرکت کو کاٹنے کی رفتار سے سست حرکت سے بدل دیا جاتا ہے۔ یہ رفتار میں تبدیلی اس وقت ہوتی ہے جب ٹول اس حصے سے کچھ فاصلے پر ہو، ورنہ ٹول تیز رفتاری سے اس حصے سے ٹکرائے گا اور ٹوٹ جائے گا۔
ایک رفتار سے دوسری رفتار میں منتقلی میں کچھ وقت لگتا ہے۔ اس وقت کے دوران، برقی آلات کو چالو کیا جاتا ہے اور تیز رفتاری سے نقل و حرکت جاری رہتی ہے۔ وولٹیج کے اتار چڑھاؤ اور دیگر بے ترتیب عوامل کے اثر و رسوخ کی وجہ سے آلات کا رسپانس ٹائم تبدیل ہو جاتا ہے۔
زیادہ سے زیادہ رفتار کائینیمیٹک چین میں گیئرز کے مناسب انتخاب سے فراہم کی جاتی ہے۔ سڑک کے آخری حصے کی رفتار میں بتدریج یا ہموار خودکار کمی سے وقت میں مزید کمی ممکن ہے، جس سے ابتدائی رفتار کو زیادہ اختیار کرنا ممکن ہو جاتا ہے۔