برقی لہروں اور کرین بیموں کی الیکٹرک ڈرائیو
 معلق الیکٹرک ٹرالیاں (الیکٹریفائیڈ ہوائیسٹ، ہوائسٹ اور کرین بیم) صنعتی احاطے میں اسمبلی اور مرمت کے کام کے دوران بوجھ اور مشین کے پرزوں کو اٹھانے اور منتقل کرنے کے لیے استعمال ہوتی ہیں۔ الیکٹرک لہرانے والے، لہرانے والے اور کرینیں برج کرینوں سے چھوٹی ہوتی ہیں، جس سے صنعتی عمارتوں کا سائز کم ہو جاتا ہے اور ان کی دیکھ بھال کے لیے اہل افراد کی ضرورت نہیں ہوتی۔
معلق الیکٹرک ٹرالیاں (الیکٹریفائیڈ ہوائیسٹ، ہوائسٹ اور کرین بیم) صنعتی احاطے میں اسمبلی اور مرمت کے کام کے دوران بوجھ اور مشین کے پرزوں کو اٹھانے اور منتقل کرنے کے لیے استعمال ہوتی ہیں۔ الیکٹرک لہرانے والے، لہرانے والے اور کرینیں برج کرینوں سے چھوٹی ہوتی ہیں، جس سے صنعتی عمارتوں کا سائز کم ہو جاتا ہے اور ان کی دیکھ بھال کے لیے اہل افراد کی ضرورت نہیں ہوتی۔
معطل شدہ الیکٹرک ٹرالیاں سختی سے متعین راستے کے ساتھ پیداواری سہولیات میں سامان اٹھانے اور منتقل کرنے کے لیے بنائی گئی ہیں۔
ایک الیکٹرک ٹرک (تصویر 1) 3 اہم حصوں پر مشتمل ہوتا ہے: ایک لفٹنگ میکانزم (الیکٹرک ہوسٹ) جو بوجھ کو اٹھانے (نیچے) اور پکڑنے کے لیے ڈیزائن کیا گیا ہے، ایک حرکت کا طریقہ کار (انڈر کیریج) جو اٹھائے گئے بوجھ کو سختی سے متعین پوزیشن کی سمت میں لے جانے کے لیے ڈیزائن کیا گیا ہے۔ ، ایک مونوریل جو افقی حرکت کو دو سمتوں میں متعین کرتی ہے۔
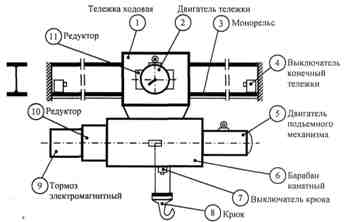
چاول۔ 1. معلق الیکٹرک کیریج کا کینیمیٹک ڈایاگرام
الیکٹرک ہوسٹ کو ورکنگ ٹرالی پر لگایا جاتا ہے اور اس میں درج ذیل آلات شامل ہوتے ہیں: لفٹنگ میکانزم کی الیکٹرک موٹر (5)، بیلناکار گیئر باکس (10) الیکٹرک موٹر کی گردش کی رفتار کو اس قدر تک کم کرنے کے لیے جو ایک دی گئی لکیری رفتار فراہم کرتی ہے۔ ہک کو اٹھانا (نیچا کرنا)، برقی مقناطیسی بریک (9)، شافٹ کی موٹر کو روکنے کے لیے جب یہ مینز سے منقطع ہو جائے یا نیٹ ورک میں وولٹیج غائب ہو جائے، بریک بریک چالو ہو جاتی ہے، اسپرنگس کی طاقت پر عمل کرتے ہوئے، جب شافٹ کو شافٹ کے گرد لپیٹ دیا جاتا ہے، ہک کی حد سوئچ (7)، ہک کو اٹھانے کو محدود کرنے کے لیے، جب دبایا جاتا ہے، انجن نیٹ ورک سے منقطع ہو جاتا ہے اور سست ہو جاتا ہے، رسی کا ڈرم (6)، سمیٹنے کے لیے ( کھولنا) اور اٹھائے ہوئے بوجھ کو محفوظ کرنے کے لیے رسی، ہک (8) کو ذخیرہ کرنا۔
انڈر کیریج کو مونوریل (3) پر نصب کیا جاتا ہے، جسے ڈبل ریل کے نچلے فلینجز پر چلنے والے پہیوں کی مدد سے مدد ملتی ہے۔ الیکٹرک موٹر (2) کے ذریعے بیلناکار گیئر باکس (11) کے ذریعے پہیوں کو چلانا۔
مونوریل — افقی حرکت کو محدود کرنے کے لیے سرے پر حد سوئچز (4) کے ساتھ I-beam۔
الیکٹرک ہوسٹ TEP-1 (لوڈ کی گنجائش 1 t، وولٹیج 380 V) انفرادی برقی ڈرائیوز کے ساتھ اٹھانے اور حرکت کرنے کے طریقہ کار پر مشتمل ہے۔ ورکنگ ڈرم 2 انجن 20 کے ذریعے سیارہ کے گیئر باکس کے ذریعے چلایا جاتا ہے جس میں سیٹلائٹ 5، 7، 8، بلاک گیئرز 13، سن گیئرز 6، 9، کیریئر 14، 15 شامل ہوتے ہیں۔ انجن بند ہونے پر مین ڈرائیو شافٹ 4۔ بہار 11 کی کارروائی کے تحت ڈسکس 10 کے ذریعے۔
لفٹنگ میکانزم کو 6.5-6.9 m/s کی رفتار سے چلانے کے لیے، AOS-32-4M قسم کی بڑھتی ہوئی سلپ کے ساتھ ایک غیر مطابقت پذیر موٹر استعمال کی جاتی ہے (1320 rpm پر 1.4 kW پاور اور ڈیوٹی سائیکل = 25%)۔ہک کی اوپر کی حرکت ایک حد سوئچ کے ذریعے محدود ہے۔
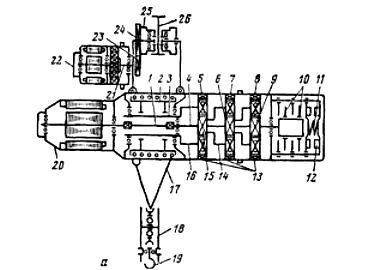
چاول۔ 2. الیکٹرک ہوسٹ کی الیکٹرک ڈرائیو TEP-1: 1 — ورکنگ ڈرم، 3 — ہولو شافٹ، 4 — ورکنگ شافٹ، 5، 7، 8 — سیٹلائٹ، 6، 9، 15 — سن گیئرز، 10 — بریک ڈسکس، 11 — بریک اسپرنگ، 12 — برقی مقناطیس، 13 — بلاک گیئرز، 14، 16، 21 — کیریئرز، 17 — کیبل، 18 — معطلی، 19 — ہک، 20 — بوجھ اٹھانے کے لیے الیکٹرک موٹر، 22 — ٹرالی الیکٹرک موٹر، 23، 24 — گیئرز، 25 — رولر، 26 — مونوریل۔
شکل 3 لہرانے کے عمل کو ظاہر کرتا ہے۔ برقی لہر کی کارکردگی 0.58 تک بڑھ جاتی ہے کیونکہ اٹھائے گئے بوجھ کا وزن 1000 کلوگرام تک بڑھ جاتا ہے۔
لوڈ کو کم کرتے وقت موٹر 4 کے آپریشن کا دلچسپ موڈ: جب کہ بوجھ کا وزن 425 کلوگرام سے کم ہوتا ہے، الیکٹرک موٹر موٹر موڈ میں کام کرتی ہے، اور جب ماس 425 کلوگرام سے زیادہ ہوتا ہے — جنریٹر موڈ میں۔ لہذا، لفٹنگ میکانزم کے بیکار لمحے پر قابو پانے کے لیے، 425 کلو گرام وزنی بوجھ کافی ہے۔
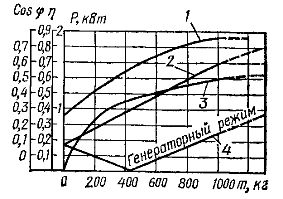
چاول۔ 3. الیکٹرک ہوسٹ کی آپریٹنگ خصوصیات: 1 — الیکٹرک موٹر کا ssphi، 2 — بوجھ اٹھاتے وقت الیکٹرک موٹر کی طاقت، 3 — کارکردگی، 4 — بوجھ کو کم کرتے وقت الیکٹرک موٹر کی طاقت۔
الیکٹرک ہوسٹ کے انڈر کیریج کو چلانے کے لیے، TEM-0.25 قسم کی ایک غیر مطابقت پذیر الیکٹرک موٹر 22 (تصویر 2) (1410 rpm پر پاور 0.25 kW اور ڈیوٹی سائیکل = 25%) ایک بلٹ ان سیارے کے سنگل سٹیج گیئر باکس کے ساتھ اور گیئر 23، 24، رولرس کی گردش کو منتقل کرنا 25. بریک لگانے والے آلات آسان ترین لہرانے والے تحریک کے طریقہ کار پر نہیں لگائے جاتے ہیں۔ دونوں سمتوں میں بیم کے ساتھ لہرانے کی حرکت مکینیکل اسٹاپس کے ذریعہ محدود ہے۔
 ایک جیب کرین ایک لہرانے سے مختلف ہوتی ہے کہ وہ شہتیر جس پر لہرانے والا سفر کرتا ہے وہ پروڈکشن روم کے گرد گھوم سکتا ہے، جسے گلہری پنجرے یا فیز روٹر الیکٹرک موٹر سے چلایا جاتا ہے۔ کرین بیم پل، جس میں الیکٹرک ڈرائیو میکانزم ہے، ایک ہی بیم کی شکل میں بنایا گیا ہے جس پر الیکٹرک انڈر کیریج حرکت کرتا ہے۔
ایک جیب کرین ایک لہرانے سے مختلف ہوتی ہے کہ وہ شہتیر جس پر لہرانے والا سفر کرتا ہے وہ پروڈکشن روم کے گرد گھوم سکتا ہے، جسے گلہری پنجرے یا فیز روٹر الیکٹرک موٹر سے چلایا جاتا ہے۔ کرین بیم پل، جس میں الیکٹرک ڈرائیو میکانزم ہے، ایک ہی بیم کی شکل میں بنایا گیا ہے جس پر الیکٹرک انڈر کیریج حرکت کرتا ہے۔
گلہری-کیج روٹر کے ساتھ تھری فیز اسینکرونس موٹرز کا استعمال آؤٹ بورڈ الیکٹرک کاروں کو چلانے کے لیے کیا جاتا ہے اور صرف زیادہ بوجھ کی گنجائش اور اسپیڈ ریگولیشن کی ضرورت ہوتی ہے اور فیز روٹر کے ساتھ بوجھ-ایسینکرونس موٹرز کی ہموار "لینڈنگ" ہوتی ہے۔
بوجھ کی ہموار لینڈنگ یا کرین کے درست رکنے کے لیے ضروری کم رفتار کی کمی کی وجہ سے، کارکن کو وقتاً فوقتاً الیکٹرک موٹروں کو آن اور آف کرنا چاہیے، اور اس سے اسٹارٹس کی تعداد بڑھ جاتی ہے اور ونڈنگز کو گرم کرنے کا سبب بنتا ہے، اور یہ بھی کم ہو جاتا ہے۔ رابطوں کی مزاحمت پہنیں۔ لہذا، کچھ کرینوں پر دو آپریٹنگ اسپیڈ کے ساتھ اٹھانے اور سفر کرنے کے لیے الیکٹرک ڈرائیوز ہوتی ہیں: برائے نام اور کم، جو سنگل اسپیڈ یا اضافی مائیکرو ڈرائیو کے بجائے دو اسپیڈ اسینکرونس موٹرز استعمال کرکے فراہم کی جاتی ہیں۔
 کم رفتار (0.2 - 0.5 m/s) معطل شدہ الیکٹرک ٹرالیاں جو گلہری-کیج موٹرز سے چلتی ہیں عام طور پر معطل شدہ استعمال کرتے ہوئے فرش (زمین) کی سطح سے کنٹرول کی جاتی ہیں۔ پش بٹن اسٹیشنز… آپریٹر کے لیے کیبن والی ایئر ٹرالیوں اور کرینوں میں (0.8 - 1.5 m/s کی رفتار سے)، فیز روٹر والی موٹرز کو کنٹرولرز کے ذریعے کنٹرول کیا جاتا ہے۔
کم رفتار (0.2 - 0.5 m/s) معطل شدہ الیکٹرک ٹرالیاں جو گلہری-کیج موٹرز سے چلتی ہیں عام طور پر معطل شدہ استعمال کرتے ہوئے فرش (زمین) کی سطح سے کنٹرول کی جاتی ہیں۔ پش بٹن اسٹیشنز… آپریٹر کے لیے کیبن والی ایئر ٹرالیوں اور کرینوں میں (0.8 - 1.5 m/s کی رفتار سے)، فیز روٹر والی موٹرز کو کنٹرولرز کے ذریعے کنٹرول کیا جاتا ہے۔
لہرانے والے اور اوور ہیڈ کرینوں کی الیکٹرک موٹرز کو کنٹرول کیا جاتا ہے۔ الٹ جانے والا مقناطیسی آغاز اور ایک لچکدار بکتر بند کیبل سے سٹارٹ بٹن معطل ہیں۔KM1 (تصویر 4) کو بڑھانے، KM2 کو نیچے کرنے، KMZ کو آگے اور پیچھے KM4 کو منتقل کرنے کے لیے کنٹیکٹرز کے کوائلز اور رابطوں کو وولٹیج ایک سرکٹ بریکر اور کیبل یا رابطہ تاروں کے ذریعے فراہم کیا جاتا ہے۔ لفٹنگ ڈیوائس کی اوپر کی طرف حرکت محدود سوئچ کے ذریعے محدود ہے۔ SQ
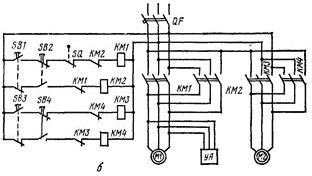
چاول۔ 4. کرین بیم کا الیکٹرک اسکیمیٹک ڈایاگرام
بیک وقت سوئچ آن کرنے سے موٹروں کے الٹنے والے کانٹیکٹرز کو بلاک کرنا ڈبل سرکٹ بٹنوں کے ذریعے اور خود کانٹیکٹرز کو مکینیکل بلاک کرنے (یا کنٹیکٹرز کے معاون رابطوں کو کھولنا) کے ذریعے کیا جاتا ہے۔
الیکٹرک ہوائیسٹس اور اوور ہیڈ کرینوں پر، اسٹارٹ بٹنز کو متعلقہ بند ہونے والے کنٹیکٹر انٹرلاک رابطوں سے نظرانداز نہیں کیا جاتا ہے، جو آپریٹر کے پش بٹن پینڈنٹ اسٹیشن کو جاری کرنے کے بعد لہرانے کو کام جاری رکھنے سے روکتا ہے۔ ایک ہی وقت میں لفٹنگ موٹر کے طور پر، UA solenoid کو متحرک کیا جاتا ہے، جو بریک کو کھولتا ہے.
لفٹنگ میکانزم کے لیے زیادہ سے زیادہ جائز آغاز کا وقت 3 - 5 سیکنڈ ہے، حرکت کے طریقہ کار کے لیے - 10 - 15 سیکنڈ۔
آپ یہ بھی دیکھ سکتے ہیں: برقی آلات اور برقی لہروں کی زنجیریں۔
الیکٹرک ٹرکوں، برقی لہروں اور اوور ہیڈ کرینوں کے انجنوں کے آپریشن کا طریقہ ان کے مقصد پر منحصر ہے۔ اگر سامان کو برج کرینوں پر مختصر فاصلے پر منتقل کیا جاتا ہے، تو انجن شرمناک قلیل مدتی موڈ میں کام کرتے ہیں (مثال کے طور پر، ورکشاپس یا گوداموں کے سیکشنز کی خدمت کرنے والی ٹرالیوں میں)۔

اوورہیڈ کرینز کے لیے جو پلانٹ کے پورے علاقے میں سامان کو نسبتاً زیادہ فاصلوں پر لے جاتی ہیں، لفٹنگ اور موونگ موٹرز کے آپریٹنگ طریقے مختلف ہوتے ہیں: پہلا شارٹ ٹرم موڈ، دوسرا طویل مدتی۔ برقی لہرانے، لہرانے اور گینٹری کرینوں کو اٹھانے اور منتقل کرنے کے لیے موٹروں کا تعین اسی طرح کیا جاتا ہے جس طرح اوور ہیڈ کرین میکانزم کے انجنوں کے لیے ہوتا ہے۔