متبادل کرنٹ برقی مشینیں۔
الیکٹرک مشینیں مکینیکل توانائی کو برقی توانائی (AC اور DC جنریٹرز) اور اس کے برعکس (الیکٹرک موٹرز) میں تبدیل کرنے کے لیے استعمال ہوتی ہیں۔
ان تمام صورتوں میں، برقی مقناطیسیت کے میدان میں بنیادی طور پر تین اہم دریافتوں کا استعمال کیا جاتا ہے: 1821 میں ایمپیئر کے ذریعے دریافت کردہ دھاروں کے مکینیکل تعامل کا رجحان، 1831 میں فیراڈے کے ذریعے دریافت کیا گیا برقی مقناطیسی انڈکشن کا رجحان، اور ان مظاہر کا نظریاتی خلاصہ۔ لینز (1834) نے انڈسڈ کرنٹ کی سمت کے اپنے معروف قانون میں (درحقیقت، لینز کے قانون نے برقی مقناطیسی عمل کے لیے توانائی کے تحفظ کے قانون کی پیش گوئی کی)۔

مکینیکل انرجی کو برقی توانائی میں تبدیل کرنے کے لیے یا اس کے برعکس، یہ ضروری ہے کہ کرنٹ اور مقناطیسی فیلڈ (مقناطیسی یا کرنٹ) کے ساتھ کنڈکٹیو سرکٹ کی رشتہ دار حرکت پیدا کی جائے۔
مسلسل آپریشن کے لیے تیار کی گئی الیکٹرک مشینوں میں، سٹیشنری حصے (اسٹیٹر) کے اندر واقع مشین کے حرکت پذیر حصے (متبادل کرنٹ مشین کا روٹر) کی روٹری حرکت کا استعمال کیا جاتا ہے۔مشین کی کنڈلی جو مقناطیسی میدان بنانے کا کام کرتی ہے اسے انڈکٹر کہا جاتا ہے، اور وہ کنڈلی جو آپریٹنگ کرنٹ کے ساتھ گردش کرتی ہے اسے آرمچر کہا جاتا ہے۔ یہ دونوں بعد کی اصطلاحات ڈی سی مشینوں کے لیے بھی استعمال ہوتی ہیں۔
مقناطیسی انڈکشن کو بڑھانے کے لیے، مشین کی ونڈنگ فیرو میگنیٹک باڈیز (اسٹیل، کاسٹ آئرن) پر رکھی جاتی ہے۔
تمام برقی مشینوں میں الٹ پھیر کی خاصیت ہوتی ہے، یعنی انہیں برقی توانائی کے جنریٹر اور برقی موٹروں کے طور پر استعمال کیا جا سکتا ہے۔

غیر مطابقت پذیر موٹرز
اسینکرونس موٹرز استعمال کی جاتی ہیں۔ برقی مقناطیسی انڈکشن کے مظاہر میں سے ایک… فزکس کے کورسز میں اس کا مظاہرہ اس طرح کیا جاتا ہے:
ایک تانبے کی ڈسک کے نیچے، جو اپنے مرکز سے گزرنے والے عمودی محور کے گرد گھوم سکتی ہے، ایک عمودی ہارس شو مقناطیس رکھا جاتا ہے جو اسی محور کے گرد گھومنے کے لیے چلایا جاتا ہے (ڈسک اور مقناطیس کے درمیان مکینیکل تعامل کو خارج کر دیا گیا ہے)۔ اس صورت میں، ڈسک مقناطیس کے طور پر ایک ہی سمت میں گھومنا شروع ہوتا ہے، لیکن کم رفتار سے. اگر آپ ڈسک پر مکینیکل بوجھ بڑھاتے ہیں (مثال کے طور پر تھرسٹ بیئرنگ کے خلاف ایکسل کی رگڑ کو بڑھا کر) تو اس کی گردش کی رفتار کم ہوجاتی ہے۔
اس رجحان کے جسمانی معنی کو برقی مقناطیسی انڈکشن کے نظریہ سے آسانی سے سمجھایا جاتا ہے: جب مقناطیس گھومتا ہے، ایک گھومنے والا مقناطیسی میدان بنتا ہے، جو ڈسک میں ایڈی کرنٹ کو اکساتا ہے، بعد کی شدت کا انحصار ہوتا ہے، دوسری چیزیں برابر ہونے پر، فیلڈ اور ڈسک کی رشتہ دار رفتار۔
لینز کے قانون کے مطابق، ڈسک کو فیلڈ کی سمت میں گھومنا چاہیے۔ رگڑ کی غیر موجودگی میں، ڈسک کو مقناطیس کی رفتار کے برابر ایک کونیی رفتار حاصل کرنی چاہیے، جس کے بعد حوصلہ افزائی شدہ emf غائب ہو جائے گی۔ حقیقی زندگی میں، رگڑ لامحالہ موجود ہے اور ڈسک سست ہو جاتا ہے.اس کی وسعت کا انحصار ڈسک کی طرف سے تجربہ کردہ مکینیکل بریک کے لمحے پر ہوتا ہے۔
ڈسک (روٹر) کی گردش کی رفتار اور مقناطیسی میدان کی گردش کی رفتار کے درمیان فرق موٹرز کے نام سے ظاہر ہوتا ہے۔
غیر مطابقت پذیر موٹروں کے آپریشن کے اصول:
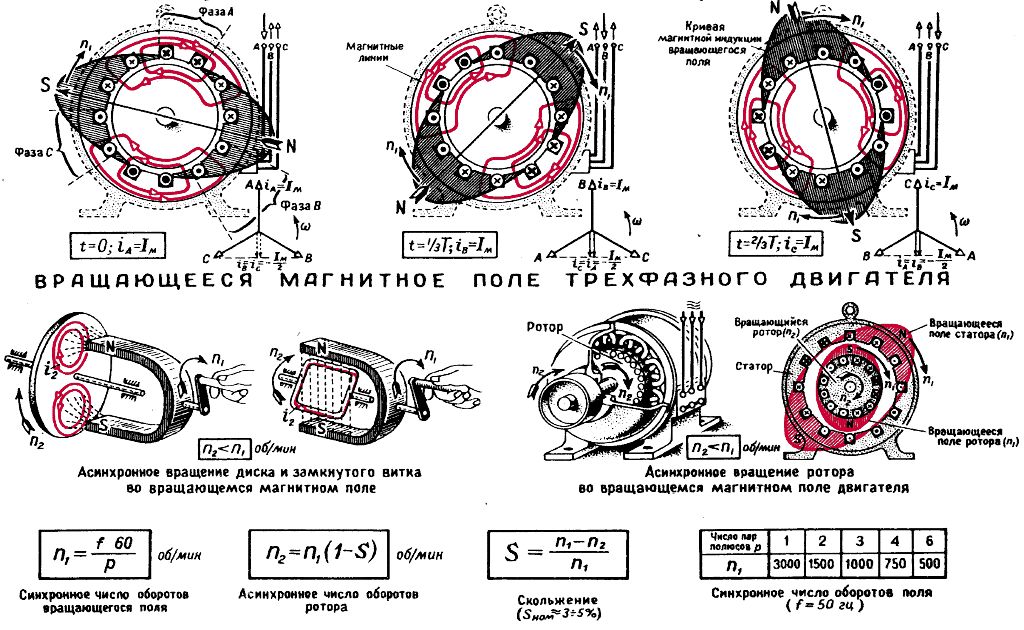
تکنیکی غیر مطابقت پذیر موٹرز میں (اکثر تین فیز) ایک گھومنے والا مقناطیسی میدان بنتا ہے۔ پولی فیز کرنٹسٹیشنری سٹیٹر سمیٹ کے ارد گرد بہہ رہا ہے. تھری فیز کرنٹ کی فریکوئنسی پر ہے اور سٹیٹر کوائلز کی تعداد 3p گھومنے والی فیلڈ n = f/p ریوولیشنز/سیکنڈ بناتی ہے۔

ایک گھومنے والا روٹر اسٹیٹر گہا میں واقع ہے۔ ایک گھومنے والا میکانزم اس کے شافٹ سے جڑا جا سکتا ہے۔ سادہ ترین "گلہری سیل" موٹرز میں، روٹر ایک فولادی بیلناکار جسم کے نالیوں میں رکھے ہوئے طول بلد دھاتی سلاخوں کے نظام پر مشتمل ہوتا ہے۔ تاروں کو دو حلقوں سے شارٹ سرکٹ کیا جاتا ہے۔ ٹارک کو بڑھانے کے لیے، روٹر کا رداس کافی بڑا بنایا جاتا ہے۔
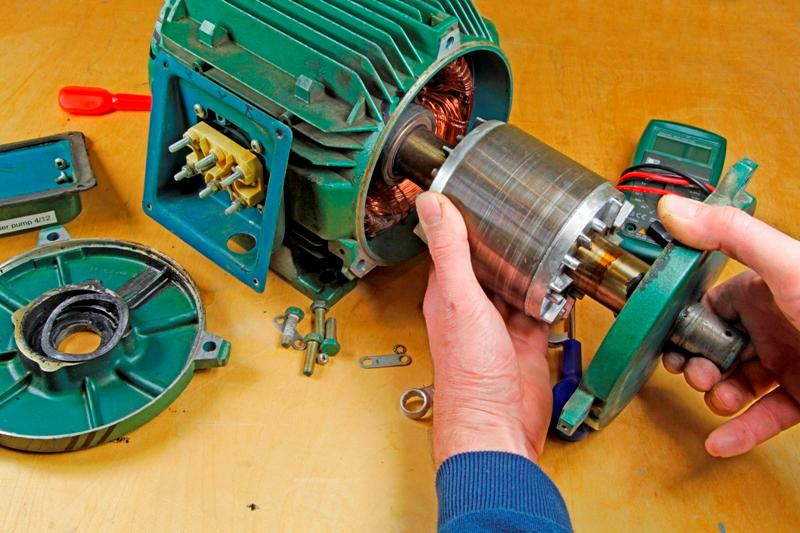
دیگر موٹر ڈیزائنوں میں (عام طور پر ہائی پاور موٹرز)، روٹر کی تاریں ایک کھلی تین فیز وائنڈنگ بناتی ہیں۔ کنڈلی کے سرے روٹر میں ہی شارٹ سرکٹ ہوتے ہیں، اور لیڈز کو روٹر شافٹ پر نصب تین سلپ رِنگز تک لایا جاتا ہے اور اس سے الگ تھلگ کیا جاتا ہے۔
ایک تھری فیز ریوسٹیٹ ان حلقوں سے سلائیڈنگ کانٹیکٹس (برش) کا استعمال کرتے ہوئے منسلک ہوتا ہے، جو موٹر کو حرکت میں لانے کا کام کرتا ہے۔ موٹر موڑنے کے بعد، ریوسٹیٹ مکمل طور پر ہٹا دیا جاتا ہے اور روٹر گلہری کا پنجرا بن جاتا ہے (دیکھیں — ایک زخم روٹر کے ساتھ غیر مطابقت پذیر موٹرز).

اسٹیٹر ہاؤسنگ پر ایک ٹرمینل بورڈ ہے۔ سٹیٹر وائنڈنگز ان کے لیے باہر لائی جاتی ہیں۔ انہیں شامل کیا جا سکتا ہے۔ ستارہ یا مثلث، مینز وولٹیج پر منحصر ہے: پہلی صورت میں مینز کا وولٹیج دوسرے سے 1.73 گنا زیادہ ہو سکتا ہے۔
انڈکشن موٹر کے سٹیٹر فیلڈ کے مقابلے روٹر کی نسبتی کمی کو نمایاں کرنے والی قدر کہلاتی ہے۔ پھسلنا… یہ 100% (موٹر شروع کرنے کے وقت) سے صفر میں تبدیل ہو جاتا ہے (لازلیس روٹر کی حرکت کی مثالی صورت)۔
انڈکشن موٹر کی گردش کی سمت کا الٹ جانا موٹر کو سپلائی کرنے والے برقی نیٹ ورک کے ہر دو لکیری کنڈکٹرز کے باہمی سوئچنگ کے ذریعے حاصل کیا جاتا ہے۔

گلہری کیج موٹرز صنعت میں بڑے پیمانے پر استعمال ہوتی ہیں۔ غیر مطابقت پذیر موٹرز کے فوائد ڈیزائن کی سادگی اور سلائیڈنگ رابطوں کی عدم موجودگی ہیں۔
کچھ عرصہ پہلے تک، ایسی موٹروں کا سب سے بڑا نقصان رفتار کے ضابطے میں دشواری تھی، کیونکہ اگر اس کے لیے سٹیٹر سرکٹ کا وولٹیج تبدیل کیا جائے، تو ٹارک تیزی سے تبدیل ہو جاتا ہے، لیکن سپلائی کرنٹ کی فریکوئنسی کو تبدیل کرنا تکنیکی طور پر مشکل تھا۔ جدید مائیکرو پروسیسر آلات اب بڑے پیمانے پر استعمال کیے جاتے ہیں تاکہ سپلائی کرنٹ کی فریکوئنسی کو کنٹرول کیا جا سکے تاکہ موٹرز کی رفتار کو مختلف کیا جا سکے۔ فریکوئنسی کنورٹرز.
الٹرنیٹرز
الٹرنیٹرز اہم پاور اور ہائی وولٹیج کے لیے بنائے گئے ہیں۔ غیر مطابقت پذیر مشینوں کی طرح، ان کے دو وائنڈنگ ہوتے ہیں۔ عام طور پر، آرمچر وائنڈنگ اسٹیٹر ہاؤسنگ میں واقع ہوتی ہے۔ انڈکٹرز جو بنیادی مقناطیسی بہاؤ بناتے ہیں وہ روٹر پر نصب ہوتے ہیں اور ایک ایکسائٹر سے چلتے ہیں - ایک چھوٹا ڈی سی جنریٹر جو روٹر شافٹ پر نصب ہوتا ہے۔ اعلی طاقت والی مشینوں میں، جوش کبھی کبھی اصلاح شدہ متبادل وولٹیج سے پیدا ہوتا ہے۔
آرمچر وائنڈنگ کی غیر متحرک ہونے کی وجہ سے، اعلی طاقتوں پر سلائیڈنگ رابطوں کے استعمال سے منسلک تکنیکی مشکلات غائب ہو جاتی ہیں۔
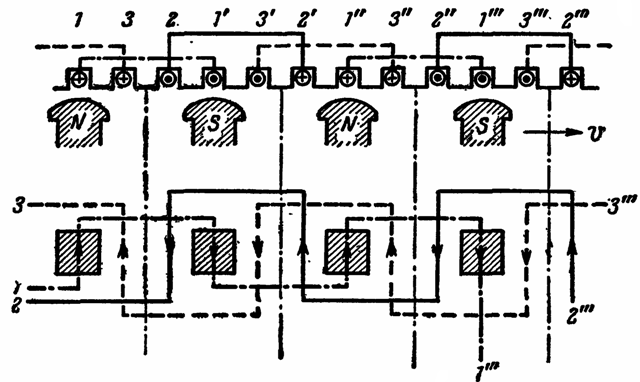
نیچے دی گئی تصویر سنگل فیز جنریٹر کی منصوبہ بندی کو ظاہر کرتی ہے۔ اس کے روٹر میں آٹھ کھمبے ہیں۔ ان پر زخم کی کنڈلی (اعداد و شمار میں نہیں دکھائی گئی) ہیں جو روٹر شافٹ پر نصب سلپ رِنگز پر براہ راست کرنٹ کے ذریعے بیرونی ذریعہ سے کھلائی جاتی ہیں۔ قطب کنڈلی کو اس طرح سے زخم کیا جاتا ہے کہ کھمبے کے نشانات اسٹیٹر کی طرف متوجہ ہوتے ہیں۔ کھمبوں کی تعداد برابر ہونی چاہیے۔
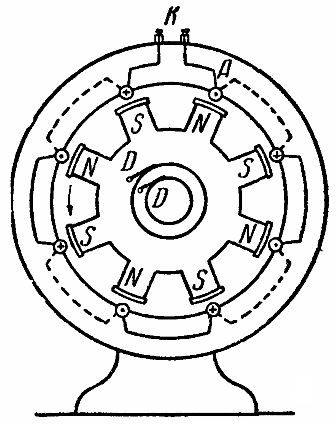
آرمچر وائنڈنگ اسٹیٹر ہاؤسنگ میں واقع ہے۔ اس کی طویل کام کرنے والی «فعال» تاریں، جو ڈرائنگ کے جہاز پر کھڑی ہیں، شکل میں دائروں کے ساتھ دکھائی گئی ہیں، جب روٹر گھومتا ہے تو وہ مقناطیسی انڈکشن کی لکیروں سے پار ہو جاتی ہیں۔
دائرے حوصلہ افزائی برقی شعبوں کی سمتوں کی فوری تقسیم کو ظاہر کرتے ہیں۔ سٹیٹر کے سامنے کی طرف چلنے والی کنیکٹنگ تاروں کو ٹھوس لکیروں کے ساتھ اور پچھلی طرف ڈیشڈ لائنوں کے ساتھ دکھایا گیا ہے۔ K clamps کا استعمال بیرونی سرکٹ کو سٹیٹر وائنڈنگ سے جوڑنے کے لیے کیا جاتا ہے۔ روٹر کی گردش کی سمت ایک تیر سے ظاہر ہوتی ہے۔
اگر آپ مشین کو کلیمپ کے درمیان سے گزرنے والے رداس کے ساتھ ذہنی طور پر کاٹ کر ہوائی جہاز میں تبدیل کرتے ہیں، تو اسٹیٹر وائنڈنگ اور روٹر کے کھمبے (سائیڈ اور پلان) کی متعلقہ پوزیشن کو اسکیمیٹک ڈرائنگ کے ساتھ دکھایا جائے گا:
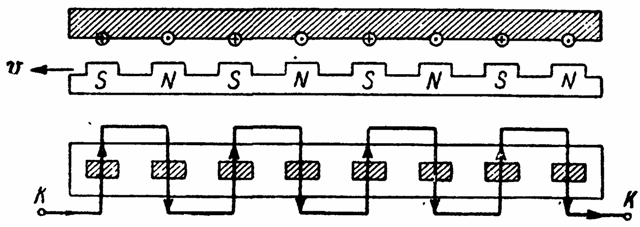
اعداد و شمار پر غور کرتے ہوئے، ہم اس بات کو یقینی بناتے ہیں کہ تمام فعال تاریں (انڈکٹر کے کھمبوں سے گزرنے والی) ایک دوسرے سے سیریز میں جڑی ہوئی ہیں اور ان میں شامل EMF کا خلاصہ ہے۔ تمام EMFs کے مراحل واضح طور پر ایک جیسے ہیں۔روٹر کی ایک مکمل گردش کے دوران، ہر تار (اور اس وجہ سے بیرونی سرکٹ میں) میں موجودہ تبدیلی کے چار مکمل ادوار حاصل کیے جائیں گے۔
اگر ایک برقی مشین میں کھمبوں کے p جوڑے ہوتے ہیں اور روٹر n انقلابات فی سیکنڈ میں گھومتا ہے، تو مشین کو موصول ہونے والے متبادل کرنٹ کی فریکوئنسی f = pn hz ہے۔
چونکہ نیٹ ورک میں EMF کی فریکوئنسی مستقل ہونی چاہیے، اس لیے روٹرز کی گردش کی رفتار مستقل ہونی چاہیے۔ تکنیکی فریکوئنسی (50 ہرٹز) کا EMF حاصل کرنے کے لیے، اگر روٹر کے کھمبوں کی تعداد کافی زیادہ ہو تو نسبتاً سست گردش استعمال کی جا سکتی ہے۔
تھری فیز کرنٹ حاصل کرنے کے لیے سٹیٹر باڈی میں تین الگ الگ وائنڈنگز رکھے جاتے ہیں۔ ان میں سے ہر ایک دوسرے دو کے مقابلے میں انڈکٹرز کے ملحقہ (مخالف) کھمبوں کے درمیان قوس کے فاصلے کے ایک تہائی کے حساب سے آفسیٹ ہوتا ہے۔
اس بات کی تصدیق کرنا آسان ہے کہ جب انڈکٹرز گھومتے ہیں، EMFs کو 120 ° فیز (وقت میں) منتقل ہونے والی کنڈلیوں میں شامل کیا جاتا ہے۔ کنڈلی کے سروں کو مشین سے ہٹا دیا جاتا ہے اور ستارے یا ڈیلٹا میں منسلک کیا جا سکتا ہے.
جنریٹر میں، فیلڈ اور کنڈکٹر کی رشتہ دار رفتار روٹر کے قطر، فی سیکنڈ روٹر کی گردشوں کی تعداد، اور قطب کے جوڑوں کی تعداد سے متعین ہوتی ہے۔

اگر جنریٹر پانی کے کرنٹ (ہائیڈروجنریٹر) سے چلتا ہے، تو یہ عام طور پر سست انقلابات کے ساتھ بنایا جاتا ہے۔ مطلوبہ موجودہ تعدد حاصل کرنے کے لیے، کھمبوں کی تعداد میں اضافہ کرنا ضروری ہے، جس کے نتیجے میں روٹر کے قطر میں اضافہ کی ضرورت ہوتی ہے۔
متعدد تکنیکی وجوہات کی بناء پر طاقتور ہائیڈروجن جنریٹرز ان میں عام طور پر عمودی شافٹ ہوتا ہے اور یہ ہائیڈرولک ٹربائن کے اوپر واقع ہوتے ہیں، جس کی وجہ سے وہ گھومتے ہیں۔

بھاپ ٹربائن سے چلنے والے جنریٹرز - ٹربائن جنریٹر عام طور پر تیز رفتار ہوتے ہیں۔ مکینیکل قوتوں کو کم کرنے کے لیے، ان کے قطر چھوٹے ہوتے ہیں اور اسی مناسبت سے کم تعداد میں کھمبے ہوتے ہیں۔ متعدد تکنیکی امور کے لیے افقی شافٹ والے ٹربائن جنریٹرز کی تیاری کی ضرورت ہوتی ہے۔
اگر جنریٹر اندرونی دہن کے انجن سے چلتا ہے، تو اسے ڈیزل جنریٹر کہا جاتا ہے، کیونکہ ڈیزل انجن عام طور پر ایسے انجن کے طور پر استعمال ہوتے ہیں جو سستا ایندھن استعمال کرتے ہیں۔

جنریٹر ریورسبلٹی، ہم وقت ساز موٹرز
اگر کسی بیرونی ذریعہ سے جنریٹر کے سٹیٹر وائنڈنگ پر متبادل وولٹیج کا اطلاق ہوتا ہے، تو سٹیٹر میں پیدا ہونے والے کرنٹ کے مقناطیسی میدان کے ساتھ انڈکٹر کے کھمبے کا تعامل ہوگا، اور اسی سمت سے ٹارک کام کریں گے۔ تمام کھمبوں پر۔
اگر روٹر اس رفتار سے گھومتا ہے کہ الٹرنیٹنگ کرنٹ کے آدھے وقفے کے بعد، انڈکٹر کا اگلا قطب (پہلے قطب کے نشان کے برعکس) سٹیٹر وائنڈنگ کے سمجھے گئے تار کے نیچے فٹ ہو جائے گا، پھر اس کا نشان اس اور کرنٹ کے درمیان تعامل کی قوت، جس نے اپنا رخ بدل دیا ہے، وہی رہے گا۔
ان حالات میں، روٹر، ٹارک کے مسلسل زیر اثر ہونے کی وجہ سے، حرکت کرتا رہے گا اور کسی بھی میکانزم کو چلانے کے قابل ہو جائے گا۔ روٹر کی نقل و حرکت کے خلاف مزاحمت پر قابو پانا نیٹ ورک کے ذریعہ استعمال ہونے والی توانائی کی وجہ سے ہوگا، اور جنریٹر الیکٹرک موٹر بن جائے گا۔.

تاہم، یہ واضح رہے کہ مسلسل حرکت صرف گردش کی سختی سے متعین رفتار پر ہی ممکن ہے، کیونکہ اس سے انحراف کی صورت میں ایک تیز رفتار لمحہ روٹر کے ہر ایک کھمبے پر جزوی طور پر کام کرے گا، جو روٹر کے دو کنڈکٹرز کے درمیان حرکت کرے گا۔ اسٹیٹر، وقت کا حصہ - رکنا
اس طرح، موٹر کی گردش کی رفتار کا سختی سے تعین کیا جانا چاہیے، - جس وقت کے دوران قطب کو اگلے والے سے تبدیل کیا جائے، اسے کرنٹ کی نصف مدت کے ساتھ موافق ہونا چاہیے، اسی لیے ایسی موٹریں کہلاتی ہیں۔ ہم وقت سازی سے.
اگر ایک متبادل وولٹیج کو سٹیشنری روٹر کے ساتھ سمیٹنے والے سٹیٹر پر لاگو کیا جاتا ہے، تو، اگرچہ موجودہ تجربے کے پہلے نصف چکر کے دوران روٹر کے تمام کھمبے ایک ہی نشان کے ٹارک کی کارروائی کا تجربہ کرتے ہیں، پھر بھی، جڑتا کی وجہ سے، روٹر کو منتقل کرنے کا وقت نہیں ہوگا. اگلے نصف سائیکل میں، تمام روٹر کے کھمبوں کے لیے ٹارک کا نشان الٹا بدل جائے گا۔
نتیجے کے طور پر، روٹر ہل جائے گا لیکن گھومنے کے قابل نہیں ہو گا. لہذا، مطابقت پذیر موٹر کو سب سے پہلے زخم کیا جانا چاہئے، یعنی، انقلابوں کی عام تعداد میں لایا جانا چاہئے، اور صرف اس صورت میں سٹیٹر وائنڈنگ میں کرنٹ کو آن کیا جانا چاہئے.
ہم وقت ساز موٹروں کی ترقی مکینیکل طریقوں (کم طاقتوں پر) اور خصوصی برقی آلات (اعلی طاقتوں پر) کی جاتی ہے۔
چھوٹے بوجھ کی تبدیلیوں کے لیے، موٹر کی رفتار نئے بوجھ کے مطابق ہونے کے لیے خود بخود بدل جائے گی۔ لہذا، جیسے جیسے موٹر شافٹ پر بوجھ بڑھتا ہے، روٹر فوری طور پر سست ہوجاتا ہے۔ لہذا، لائن وولٹیج اور سٹیٹر وائنڈنگ میں انڈکٹر کی طرف سے حوصلہ افزائی مخالف حوصلہ افزائی EMF کے درمیان فیز شفٹ بدل جاتا ہے۔
اس کے علاوہ، آرمچر ری ایکشن انڈکٹرز کی ڈی میگنیٹائزیشن پیدا کرتا ہے، اس لیے اسٹیٹر کرنٹ بڑھتا ہے، انڈکٹرز کو ٹارک میں اضافہ ہوتا ہے، اور موٹر بڑھے ہوئے بوجھ پر قابو پاتے ہوئے دوبارہ ہم آہنگی سے گھومنا شروع کر دیتی ہے۔ اسی طرح کا عمل لوڈ میں کمی کے ساتھ ہوتا ہے۔
بوجھ میں تیز اتار چڑھاؤ کے ساتھ، موٹر کی یہ موافقت ناکافی ہو سکتی ہے، اس کی رفتار نمایاں طور پر تبدیل ہو جائے گی، یہ "ہم آہنگی سے باہر ہو جائے گی" اور آخر کار رک جائے گی، جبکہ سٹیٹر میں شامل انڈکشن EMF غائب ہو جاتا ہے، اور اس میں کرنٹ بڑھ جاتا ہے۔ تیزی سے لہذا، بوجھ میں تیز اتار چڑھاؤ سے گریز کرنا چاہیے۔ موٹر کو روکنے کے لیے، ظاہر ہے کہ آپ کو پہلے سٹیٹر سرکٹ کو منقطع کرنا ہوگا اور پھر چوکس کو منقطع کرنا ہوگا۔ انجن کو شروع کرتے وقت، آپ کو آپریشن کے الٹ ترتیب پر عمل کرنا ہوگا۔
ہم وقت ساز موٹریں اکثر ایسے میکانزم کو چلانے کے لیے استعمال ہوتی ہیں جو مستقل رفتار سے کام کرتی ہیں۔ ہم وقت ساز موٹرز کے فوائد اور نقصانات اور ان کو شروع کرنے کے طریقے یہ ہیں: ہم وقت ساز موٹرز اور ان کی ایپلی کیشنز
تعلیمی فلم کی پٹی - "سنکرونس موٹرز"، جسے 1966 میں تعلیمی وژول ایڈز فیکٹری نے بنایا تھا۔ آپ اسے یہاں دیکھ سکتے ہیں: فلم اسٹریپ «ہم وقت ساز موٹر»
