انجن کا آغاز اور بریک سرکٹس
 فی الحال، سب سے زیادہ عام تین فیز گلہری-کیج روٹر انڈکشن موٹرز. فل مین وولٹیج پر سوئچ آن ہونے پر ایسی موٹروں کو شروع کرنا اور بند کرنا مقناطیسی اسٹارٹرز کا استعمال کرتے ہوئے دور سے کیا جاتا ہے۔
فی الحال، سب سے زیادہ عام تین فیز گلہری-کیج روٹر انڈکشن موٹرز. فل مین وولٹیج پر سوئچ آن ہونے پر ایسی موٹروں کو شروع کرنا اور بند کرنا مقناطیسی اسٹارٹرز کا استعمال کرتے ہوئے دور سے کیا جاتا ہے۔
سب سے زیادہ استعمال ہونے والا سرکٹ ایک اسٹارٹر کے ساتھ ہے اور کنٹرول کے بٹن "شروع کریں" اور "روکیں". موٹر شافٹ کی دونوں سمتوں میں گردش کو یقینی بنانے کے لیے، دو اسٹارٹرز (یا ریورسنگ اسٹارٹر کے ساتھ) اور تین بٹن والا سرکٹ استعمال کیا جاتا ہے۔ یہ اسکیم آپ کو موٹر شافٹ کی گردش کی سمت کو "مکھی پر" پہلے روکے بغیر تبدیل کرنے کی اجازت دیتی ہے۔
انجن شروع ہونے والے خاکے
الیکٹرک موٹر M تین فیز الٹرنیٹنگ وولٹیج نیٹ ورک سے چلتی ہے۔ QF تھری فیز سرکٹ بریکر شارٹ سرکٹ کی صورت میں سرکٹ کو منقطع کرنے کے لیے ڈیزائن کیا گیا ہے۔ سنگل فیز SF سرکٹ بریکر کنٹرول سرکٹس کی حفاظت کرتا ہے۔
مقناطیسی سٹارٹر کا بنیادی عنصر کنٹریکٹر KM (اعلی کرنٹ کو سوئچ کرنے کے لیے پاور ریلے) ہے۔ اس کے پاور رابطے الیکٹرک موٹر کے لیے موزوں تین مراحل کو سوئچ کرتے ہیں۔ بٹن SB1 ("اسٹارٹ") انجن کو شروع کرنے کے لیے ہے، اور بٹن SB2 ("اسٹاپ") رکنے کے لیے ہے۔تھرمل بائی میٹالک ریلے KK1 اور KK2 سرکٹ کو منقطع کر دیتے ہیں جب برقی موٹر کے ذریعے استعمال ہونے والے کرنٹ سے زیادہ ہو جاتا ہے۔
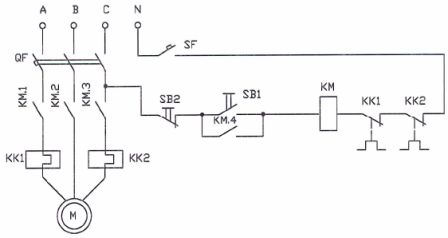
چاول۔ 1. مقناطیسی اسٹارٹر کا استعمال کرتے ہوئے تین فیز غیر مطابقت پذیر موٹر شروع کرنے کی اسکیم
جب SB1 بٹن دبایا جاتا ہے، تو رابطہ کار KM چالو ہو جاتا ہے اور KM.1، KM.2، KM.3 رابطے الیکٹرک موٹر کو نیٹ ورک سے جوڑ دیتے ہیں، اور KM.4 رابطہ کے ساتھ یہ بٹن کو بلاک کر دیتا ہے (سیلف لاکنگ) .
الیکٹرک موٹر کو روکنے کے لیے، بٹن SB2 کو دبانا کافی ہے، جب کہ کنیکٹر KM الیکٹرک موٹر کو چھوڑ کر بند کر دیتا ہے۔
مقناطیسی سٹارٹر کی ایک اہم خاصیت یہ ہے کہ نیٹ ورک میں وولٹیج کے حادثاتی نقصان کی صورت میں موٹر بند کر دی جاتی ہے، لیکن نیٹ ورک میں وولٹیج کی بحالی موٹر کے اچانک شروع ہونے کا باعث نہیں بنتی، کیونکہ جب وولٹیج بند ہو گیا ہے، کنٹیکٹر KM جاری ہو گیا ہے اور اسے دوبارہ آن کرنے کے لیے، SB1 بٹن دبائیں۔
تنصیب میں خرابی کی صورت میں، مثال کے طور پر، جب موٹر کا روٹر جام ہو جاتا ہے اور رک جاتا ہے، تو موٹر کے ذریعے استعمال ہونے والا کرنٹ کئی گنا بڑھ جاتا ہے، جس سے تھرمل ریلے کے آپریشن، KK1، KK2 کے روابط کھلتے ہیں۔ اور تنصیب کی بندش. KK رابطوں کو بند حالت میں واپس کرنا غلطی کو دور کرنے کے بعد دستی طور پر کیا جاتا ہے۔
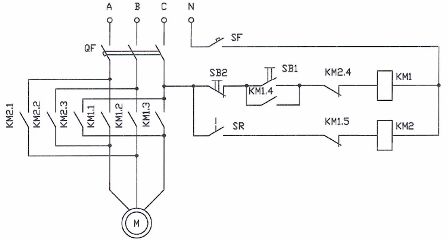
ایک الٹ جانے والا مقناطیسی اسٹارٹر نہ صرف برقی موٹر کو شروع کرنے اور روکنے کی اجازت دیتا ہے بلکہ روٹر کی گردش کی سمت کو بھی تبدیل کرتا ہے۔ اس مقصد کے لیے، سٹارٹر سرکٹ (تصویر 2) میں رابطہ کاروں اور اسٹارٹ بٹنوں کے دو سیٹ ہوتے ہیں۔
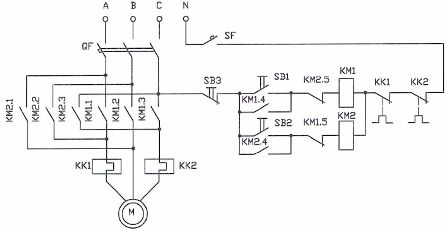
چاول۔ 2. ریورس ایبل میگنیٹک اسٹارٹر کا استعمال کرتے ہوئے انجن کو شروع کرنے کی اسکیم
KM1 کونٹیکٹر اور SB1 سیلف لاکنگ بٹن کو انجن کو "فارورڈ" موڈ میں آن کرنے کے لیے ڈیزائن کیا گیا ہے، اور KM2 کونٹیکٹر اور SB2 بٹن میں "ریورس" موڈ شامل ہے۔تھری فیز موٹر کے روٹر کی گردش کی سمت کو تبدیل کرنے کے لیے، سپلائی وولٹیج کے تین مراحل میں سے کسی بھی دو کو تبدیل کرنا کافی ہے، جو رابطہ کاروں کے مرکزی رابطوں کے ذریعے فراہم کیا جاتا ہے۔
بٹن SB3 موٹر کو روکنے کے لیے ڈیزائن کیا گیا ہے، KM 1.5 اور KM2.5 کے رابطے مسدود ہیں، اور تھرمل ریلے KK1 اور KK2 اوور کرنٹ سے تحفظ فراہم کرتے ہیں۔
موٹر کو فل لائن وولٹیج پر شروع کرنے کے ساتھ ہائی انرش کرنٹ ہوتے ہیں، جو محدود سپلائی نیٹ ورک کے لیے ناقابل قبول ہو سکتے ہیں۔
برقی موٹر کو شروع کرنے کے لیے موجودہ کرنٹ کی حد (تصویر 3) میں ریزسٹرس R1, R2, R3 شامل ہیں جو موٹر کے ونڈوں کے ساتھ سیریز میں جڑے ہوئے ہیں۔ یہ ریزسٹر شروع ہونے کے وقت کرنٹ کو محدود کرتے ہیں جب SB1 بٹن دبانے کے بعد کنٹیکٹر KM چالو ہوتا ہے۔ KM کے ساتھ ساتھ، جب رابطہ KM.5 بند ہوتا ہے، وقت کا ریلے KT چالو ہوجاتا ہے۔
ٹائمنگ ریلے کی طرف سے فراہم کی جانے والی تاخیر موٹر کو تیز کرنے کے لیے کافی ہونی چاہیے۔ ہولڈنگ ٹائم کے اختتام پر، رابطہ KT بند ہو جاتا ہے، ریلے K چالو ہو جاتا ہے اور اپنے رابطوں کے ذریعے K.1, K.2, K.3 شروع ہونے والے ریزسٹروں کو چالیں کرتا ہے۔ شروع کرنے کا عمل مکمل ہے اور انجن مکمل وولٹیج پر ہے۔
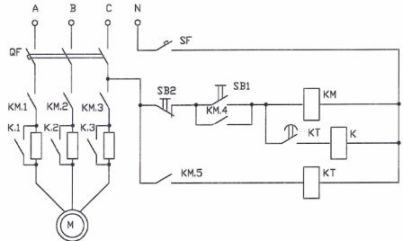
چاول۔ 3. موجودہ حد کے ساتھ موٹر کو شروع کرنے کی اسکیم
اس کے بعد، ہم تھری فیز اسکوائرل کیج انڈکشن موٹرز کے لیے دو مقبول بریکنگ اسکیموں کو دیکھیں گے: ایک ڈائنامک بریکنگ اسکیم اور ایک الٹا بریکنگ اسکیم۔
انجن بریک چینز
موٹر سے وولٹیج کو ہٹانے کے بعد، اس کا روٹر جڑتا ہونے کی وجہ سے کچھ دیر تک گھومتا رہتا ہے۔ متعدد آلات میں، مثال کے طور پر اٹھانے اور پہنچانے کے طریقہ کار میں، اوور ہینگ کی مقدار کو کم کرنے کے لیے زبردستی رکنے کی ضرورت ہوتی ہے۔متحرک بریک اس حقیقت پر مشتمل ہے کہ متبادل وولٹیج کو ہٹانے کے بعد، ایک براہ راست کرنٹ الیکٹرک موٹر کے ونڈنگز سے گزرتا ہے۔
متحرک بریکنگ سرکٹ تصویر میں دکھایا گیا ہے۔ 4.
چاول۔ 4. متحرک انجن بریکنگ ڈایاگرام
سرکٹ میں، مرکزی رابطہ کار KM کے علاوہ، ایک ریلے K ہے، جو سٹاپ موڈ کو آن کرتا ہے۔ چونکہ ریلے اور کنٹیکٹر کو ایک ہی وقت میں آن نہیں کیا جا سکتا، اس لیے ایک بلاکنگ سکیم استعمال کی جاتی ہے (رابطے KM.5 اور K.3)۔
جب SB1 بٹن دبایا جاتا ہے، تو رابطہ کرنے والا KM چالو ہوتا ہے، موٹر کو متحرک کرتا ہے (KM.1 KM.2، KM.3 سے رابطہ کرتا ہے)، بٹن (KM.4) کو بلاک کرتا ہے اور ریلے K (KM.5) کو روکتا ہے۔ KM.6 کو بند کرنا KT ٹائم ریلے کو چالو کرتا ہے اور بغیر کسی تاخیر کے KT رابطہ بند کر دیتا ہے۔ تو انجن شروع ہو جاتا ہے۔
انجن کو روکنے کے لیے، SB2 بٹن دبائیں۔ کنٹیکٹر KM جاری ہوتا ہے، رابطہ KM.1 — KM.3 کھل جاتا ہے، موٹر کو بند کرنا، رابطہ KM.5 بند ہوتا ہے، جو ریلے K.1 اور K.2 کو بند کرتا ہے، کنڈلی کو براہ راست کرنٹ فراہم کرتا ہے۔ ایک تیز رفتار سٹاپ ہوتا ہے۔
جب رابطہ KM.6 کھلتا ہے، وقت کا ریلے KT جاری ہوتا ہے، تاخیر شروع ہوتی ہے۔ انجن کو مکمل طور پر رکنے کے لیے رہائش کا وقت کافی ہونا چاہیے۔ تاخیر کے اختتام پر، رابطہ KT کھلتا ہے، K کو ریلے کرتا ہے اور موٹر وائنڈنگز سے DC وولٹیج کو ہٹاتا ہے۔
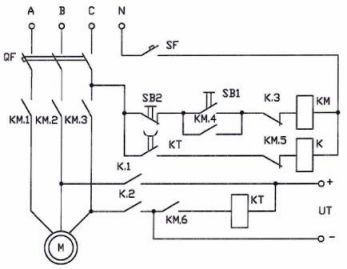
روکنے کا سب سے مؤثر طریقہ موٹر کو ریورس کرنا ہے، جب بجلی بند ہونے کے فوراً بعد، الیکٹرک موٹر پر وولٹیج لگائی جاتی ہے، جو کاؤنٹر ٹارک کی ظاہری شکل کا سبب بنتی ہے۔ مخالف بریک سرکٹ تصویر میں دکھایا گیا ہے۔ 5۔
چاول۔ 5. اپوزیشن کی طرف سے انجن بریک سرکٹ
موٹر کی رفتار SR رابطہ کے ساتھ رفتار ریلے کے ذریعے مانیٹر کی جاتی ہے۔اگر رفتار ایک خاص قدر سے زیادہ ہے، تو SR رابطہ بند ہو جاتا ہے۔ جب موٹر رک جاتی ہے، تو رابطہ SR کھلتا ہے۔ براہ راست رابطہ کار KM1 کے علاوہ، سرکٹ میں ایک الٹنے والا رابطہ KM2 ہوتا ہے۔
جب انجن سٹارٹ ہوتا ہے تو کنٹیکٹر KM1 چالو ہوجاتا ہے اور KM 1.5 کنٹیکٹ کے ساتھ کوائل KM2 کا سرکٹ ٹوٹ جاتا ہے۔ جب ایک خاص رفتار پہنچ جاتی ہے، تو SR رابطہ بند ہو جاتا ہے، سرکٹ کو الٹ جانے کے لیے تیار کرتا ہے۔
جب موٹر رک جاتی ہے تو، کنٹیکٹر KM1 جاری کرتا ہے اور رابطہ KM1.5 کو بند کرتا ہے۔ نتیجے کے طور پر، کنٹیکٹر KM2 کو چالو کرتا ہے اور بریک لگانے والی موٹر کو ریورس وولٹیج فراہم کرتا ہے۔ روٹر کی رفتار میں کمی کی وجہ سے SR کھل جاتا ہے، کنٹیکٹر KM2 ریلیز ہوتا ہے، بریک بند ہو جاتی ہے۔